The mind's toolbox is a paradigm that explains the flexibility and robustness of problem solving in biological agents. In this project we aim to provide a better understanding of the cognitive and computational mechanisms underlying the strategy selection from the mind's toolbox. Our research has the potential to advance our understanding of how the mind works, with practical implications for a wide range of domains, including psychology, biology and robotics.
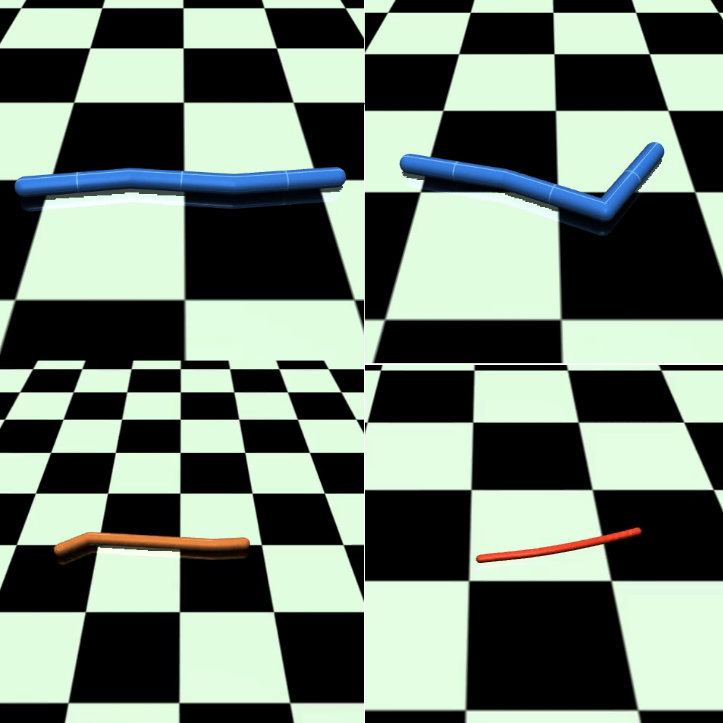
Co-design involves jointly programming morphology and control to produce a robot that can robustly solve tasks in a wide range of situations. Automated co-design of hardware and software is a challenge due to the ginormous combined space of morphology and control. To reduce the search space, appropriate inductive biases must be used to guide the search and eliminate portions of the space that are unlikely to contain good solutions.
This thesis explores how agents gather information and select actions to exhibit intelligent behavior in 2D simulations. By investigating task-specific representations, this thesis aims to optimize action strategies. It emphasizes the importance of tailored representations for different tasks, aiming to understand their impact on agent performance in 2D simulation environments. This research has the potential to contribute to the development of more advanced and effective artificial intelligence systems.
 © DALL·E 2
© DALL·E 2