Vision-Based Teleoperation of the Compliant RBO Hand 3
Motivation
Die meisten Modelle der Kontaktdynamik zeigen ein unrealistisches Verhalten aufgrund von Annahmen, die aus rechnerischen Gründen getroffen wurden. Leider gibt es einen Mangel an experimentellen Arbeiten, um diese Annahmen zu validieren und zu bewerten, wie realistisch diese Kontaktmodellierungsansätze sind, was der Zweck dieser Arbeit ist.
Beschreibung der Arbeit
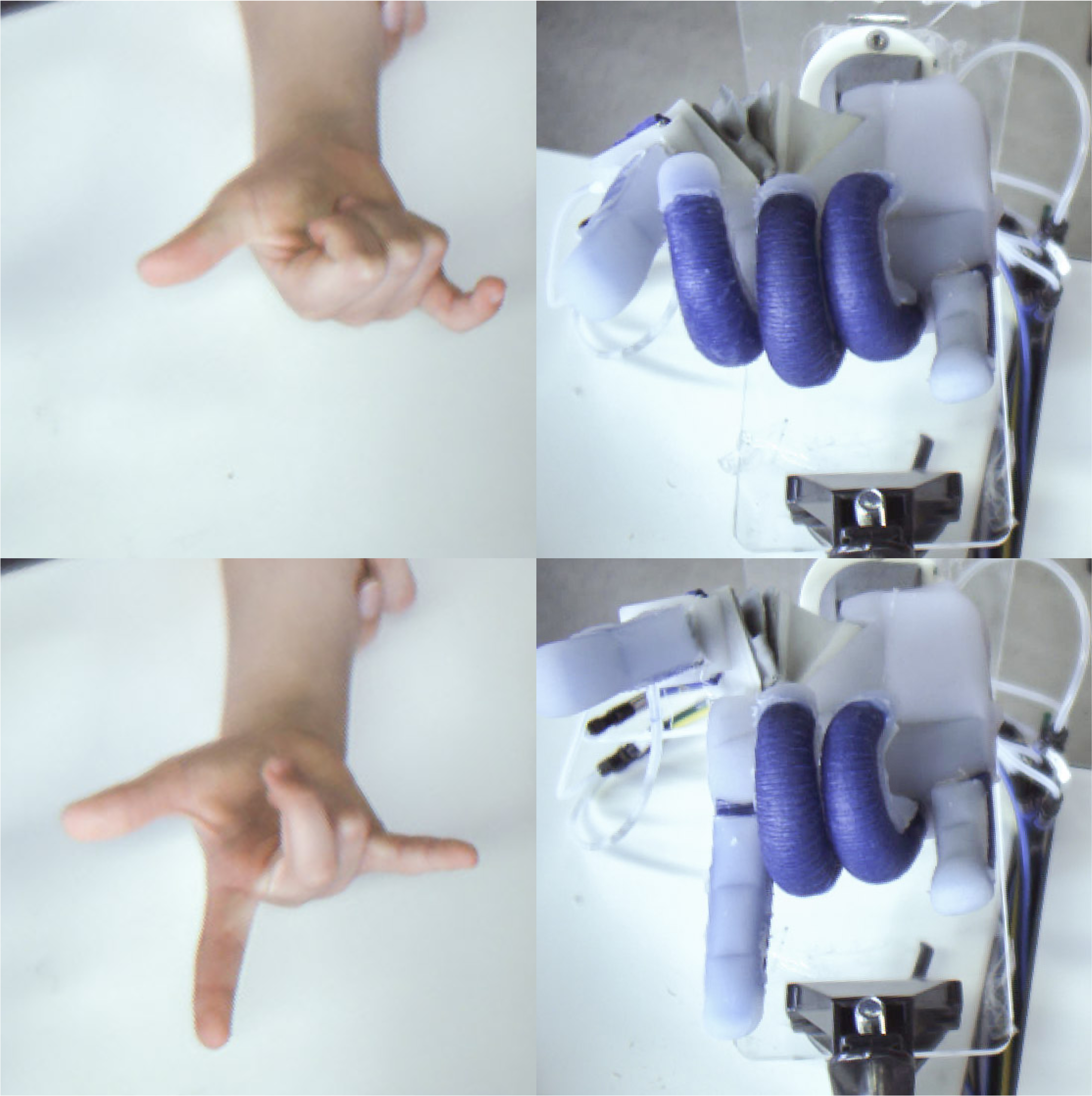
Mithilfe eines handelsüblichen Computer-Vision-Tools werden die Hand- und Handgelenkshaltungen des Benutzers mit mehreren Kameras erfasst und die 3D-Handhaltung anhand eines kinematischen Modells geschätzt, um das Wissen über die menschliche Hand zu nutzen. Beim Wechsel in den Gelenkraum werden die menschlichen Gelenkwinkel auf die RBO Hand 3 abgebildet, zunächst in der Simulation, dann auf die Roboterhand. Anschließend werden Experimente durchgeführt, um die Qualität des Teleoperationsaufbaus für die Erzeugung komplexer Manipulationen in der Hand zu bewerten.