Recurrent State Representation Learning with Robotic Priors
 © RBO
© RBO
Motivation
In robotics, the sensory inputs are high dimensional, however, only a small subspace is important to guide the actions of a robot. Previous work by Jonschkowski and Brock in 2015 presented an unsupervised learning method extracting a low dimensional representation using robotic priors. These robotic priors encode knowledge about the physical world in a loss function. However, their and that of other methods to learn such a representation rely on an Markovian observation space.
Description of Work
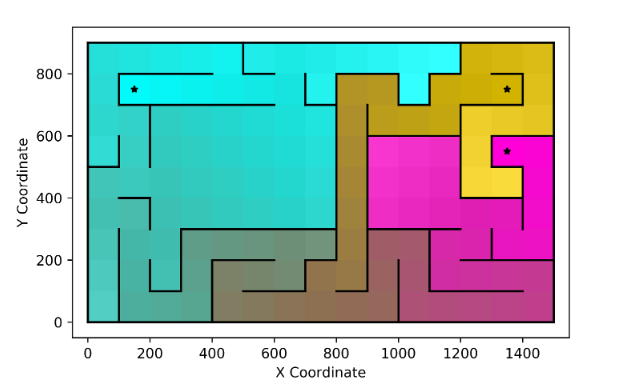
We extend the idea of robotic priors to work on non Markovian observation spaces. For this, we train a recurrent neural network on trajectories, such that the network learns to encode past information in its hidden state. With this we are able to learn a Markovian state space. To train this network, we combine and modify existing robotic priors to work in non Markovian environments. We test our method in a 3D maze environment. To evaluate the quality of the learned state representation, we introduce a validation network that maps from the learned states to the ground truth.