Experimental Validation of Contact Dynamics for Prehensile Pushing
Motivation
Die meisten Modelle der Kontaktdynamik zeigen ein unrealistisches Verhalten aufgrund von Annahmen, die aus rechnerischen Gründen getroffen wurden. Leider gibt es einen Mangel an experimentellen Arbeiten, um diese Annahmen zu validieren und zu bewerten, wie realistisch diese Kontaktmodellierungsansätze sind, was der Zweck dieser Arbeit ist.
Beschreibung der Arbeit
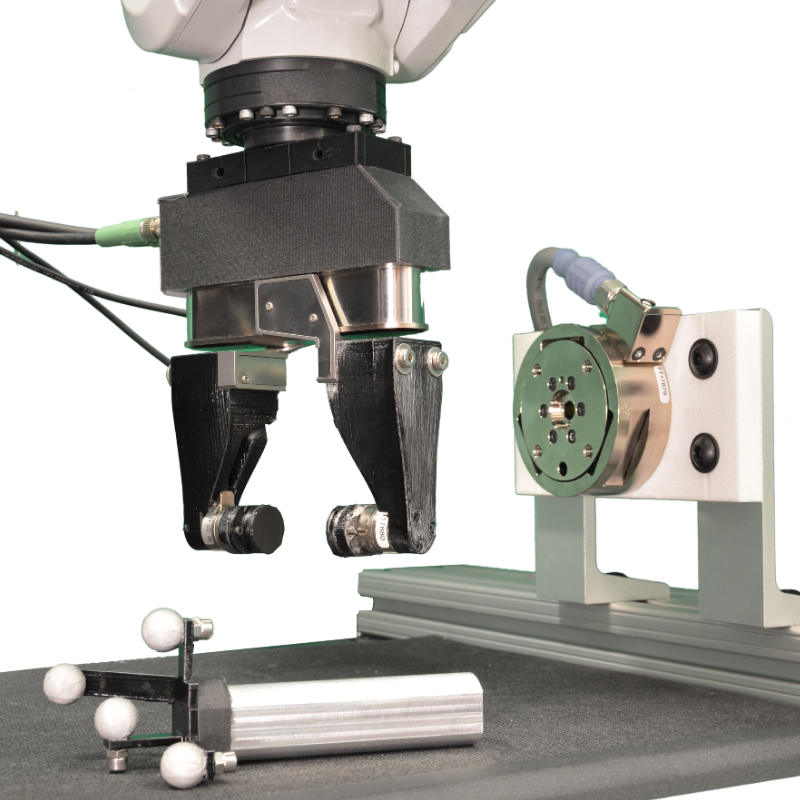
Die Anwendung der Wahl ist Teil eines interessanten Manipulationsproblems, das als "Prehensile Pushing" bezeichnet wird. Prehensile Pushing ist eine Form der In-Hand-Manipulation, die die Umgebung ausnutzt, um die Orientierung und Position eines gegriffenen Objekts im Greifer zu verändern. Es wurde ein Versuchsaufbau entwickelt, um Kräfte und Drehmomente an allen Kontakten sowie die Bewegung eines gegriffenen Objekts in drei Dimensionen zu messen, während drei verschiedene Prehensile Pushing-Aktionen - lineares Schieben, Schwenken und Rollen - autonom ausgeführt werden.
Ergebnisse
Kolbert validierte eine Reihe von Annahmen, die in der Kontaktdynamik nach dem Stand der Technik verwendet werden, indem er die Ergebnisse von Prehensile Pushing-Experimenten untersuchte. Diese Annahmen wurden auf die experimentellen Daten angewandt und ihre Vorhersagen validiert. Einige dieser Annahmen erwiesen sich nur bis zu einem gewissen Grad als gültig. Die Arbeit zeigt, dass das Trockenreibungsgesetz von Koloumb eine der schwächsten Annahmen ist, obwohl es in vielen Kontaktmodellen verwendet wird. Kolbert fand heraus, dass das Prehensile Pushing Model Kräfte, Drehmomente und Bewegungen erster Ordnung vorhersagt, obwohl es rechenintensiver ist, und dass das in MuJoCo verwendete Modell das Verhalten nur bis zu einem gewissen Grad vorhersagt, obwohl es rechenarm ist. Kolbert stellte auch fest, dass die Variabilität der lokalen Kräfte innerhalb von Läufen mit denselben Parametern die Vorhersagbarkeit dieser Kräfte einschränkt und die Eindeutigkeit einer gültigen Lösung in Frage stellt.