Coordinated Actuation of Wrist and Handin Human Grasping with Robot Hands
Personen
Armin Schröder
Can Erdogan
Oliver Brock
Zusammenfassung
Motivation
Klassische Greifroboter verwenden statische Verhaltensweisen: Zuerst wird die Hand zum Objekt manövriert, dann werden die Finger geschlossen, und schließlich wird die Hand mit dem ergriffenen Objekt aus der Szene zurückgezogen. Im Gegensatz dazu führen Menschen Handgelenkbewegungen gleichzeitig mit dem Schließen der Finger aus. Sie zeigen auch eine höhere Leistung in Bezug auf die Stabilität. Ich stelle daher die Hypothese auf, dass diese Koordination von Hand und Handgelenk ein robustes Greifen mit Robotern ermöglichen würde.
Beschreibung der Arbeit
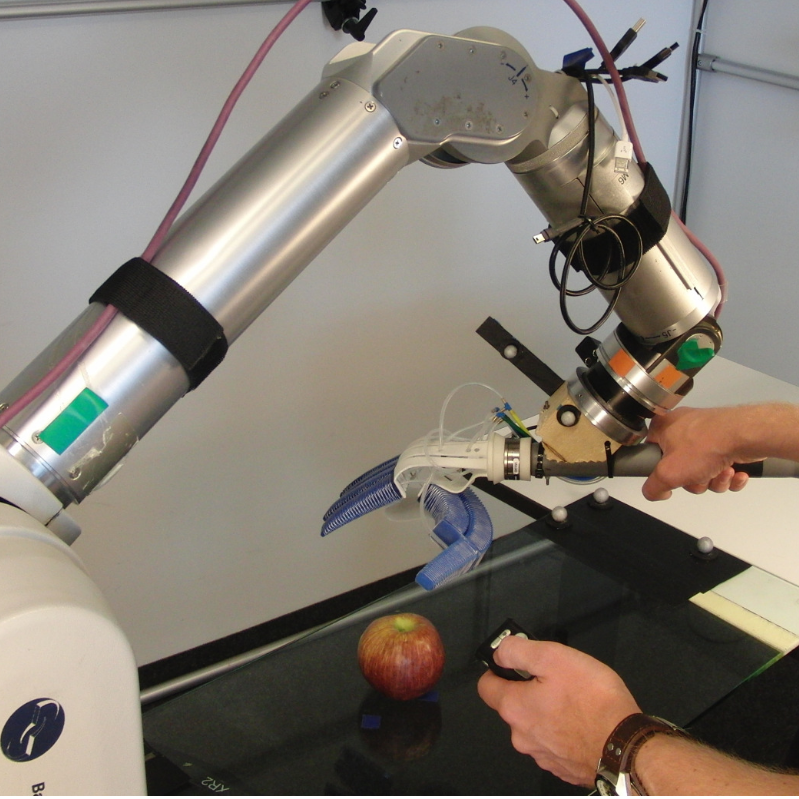
Um diese Hypothese zu überprüfen, habe ich ein Experiment mit sieben menschlichen Versuchspersonen durchgeführt, die mit einer Roboterhand eine Reihe von sieben Objekten ergriffen. Die Versuchspersonen steuerten die Roboterhand mit einem Griff und schlossen die Finger nach Belieben. Ich verwendete einen nachgiebigen Roboterarm, um die Kontrolle der Probanden über die Handgelenksbewegung in fünf Versuchsbedingungen unterschiedlich stark einzuschränken.
Ergebnisse
Ich habe beobachtet, dass mit zunehmender Beeinträchtigung die Erfolgsquote abnimmt und weniger Objekte zuverlässig gegriffen werden können. Dieses Ergebnis unterstützt die Hypothese, dass robustes Greifen mit Robotern von der Koordination abhängt. Um die Rolle der Handgelenksbewegung zu bewerten, kategorisierte ich die Koordinationsmuster auf der Grundlage von Objekttypen. Interessanterweise stellte sich dabei heraus, dass die Ausnutzung von Umgebungseinschränkungen die Koordinationsanforderungen lockern kann.
Schließlich demonstriere ich die Übertragbarkeit der Ergebnisse auf Roboteranwendungen, indem ich eines der beobachteten Koordinationsmuster auf dem Roboter implementiere. Mit dieser Strategie war ich in der Lage, die Fähigkeiten des Roboters im Vergleich zu einem einfachen Top-Down-Griff zu erweitern.
Publications
2018
Erdogan,
Can;
Schröder,
Armin;
Brock,
Oliver
Coordination of Intrinsic and Extrinsic Degrees of Freedom in Soft Robotic Grasping
Proceedings of the IEEE International Conference on Robotics and Automation, Seite 1-6
Mai 2018
Coordination of Intrinsic and Extrinsic Degrees of Freedom in Soft Robotic Grasping
Proceedings of the IEEE International Conference on Robotics and Automation, Seite 1-6
Mai 2018