Active Acoustic Sensing
Motivation
Sensoren sind ein wichtiger Bestandteil eines jeden Robotersteuerungssystems. Während weiche pneumatische Aktoren die meisten Sensoren aus der starren Robotik nicht verwenden können, weisen sie Eigenschaften auf, die neue Erfassungsmodalitäten ermöglichen. Die Luft in der Luftkammer eines pneumatischen Aktuators leitet Schall, und dieser Schall trägt Informationen darüber, wo er entstanden ist und welchen Weg er zurückgelegt hat.
Beschreibung der Arbeit
In dieser Arbeit wird ein Kontaktsensor entwickelt und charakterisiert, indem ein bekanntes Geräusch abgespielt und analysiert wird, wie es sich verändert, wenn ein PneuFlex-Aktor ein Objekt auf unterschiedliche Weise berührt.
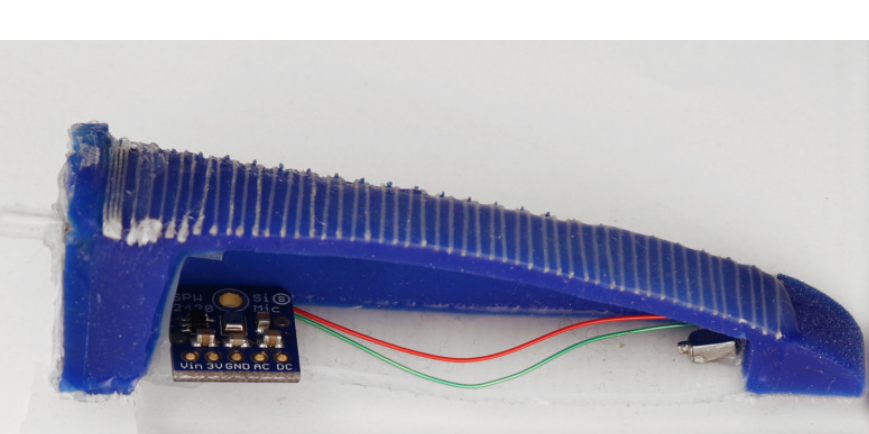
Ein kleines Mikrofon und ein Lautsprecher sind in die Luftkammer eingebettet, ein Geräusch mit einem breiten Spektrum wird abgespielt, aufgezeichnet und durch einen Klassifikator geleitet. Die räumliche Auflösung dieses Sensors ist sehr hoch und kann zwischen Kontaktbereichen von 3 mm Größe auf einem 85 mm langen Aktuator unterscheiden.
Ergebnisse
Der entwickelte Sensor ist in der Lage, Berührungen an sechs verschiedenen Stellen mit hoher Klassifizierungsrate zu erkennen. Sowohl eine laute Umgebung als auch der Wechsel der berührten Testobjekte haben einen sehr geringen Einfluss auf die Leistung der aktiven Kontaktortung. Der Sensor kann für die Arbeit mit Menschen und Robotern trainiert werden, und die Genauigkeit des Sensors kann 3.7 mm erreichen. Abschließend wird ein Experiment vorgestellt, bei dem der Sensor live an einem Roboter getestet wurde.
Publications
Gabriel Zöller and Vincent Wall and Oliver Brock. Acoustic Sensing for Soft Pneumatic Actuators. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6986-6991, 2018.