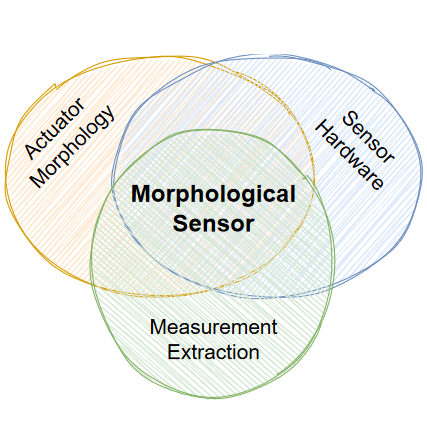
In dieser Arbeit wird "Morphological Sensing" vorgestellt, ein neuer Ansatz für weiche pneumatische Aktoren in der Robotik. Der Ansatz nutzt die Nachgiebigkeit des Aktors, um verschiedene Eigenschaften durch Beobachtung morphologischer Veränderungen zu messen. Im Gegensatz zu herkömmlichen Methoden umfasst er die Nachgiebigkeit und ermöglicht die Erkennung mit einfacher Sensorhardware. Morphological Sensing ermöglicht die Erkennung komplexer Muster, wie z. B. der Blindenschrift, und die Schätzung der Temperatur durch aktuatorisch modulierte Geräusche. Die Innovation dieses Ansatzes liegt in der Kombination von Morphological Computation und Computational Sensing . Dadurch werden physikalische Interaktionen in quantifizierbare Daten umgewandelt, wobei die Herausforderungen bei der Sensorisierung inhärent weicher Aktoren angegangen werden und trotz komplexer Verformungen genaue Messungen möglich sind.
In dieser Dissertation wird die Bedeutung der Proteinstrukturvorhersage in der Computerbiologie für die Arzneimittelentwicklung und das Verständnis biologischer Prozesse erörtert. Zwar haben Berechnungsmethoden wie Alphafold 2 die Vorhersagen unter Verwendung von Ko-Evolutionsinformationen verbessert, doch haben sie Probleme, wenn solche Daten nicht verfügbar sind. Die übermäßige Abhängigkeit von koevolutionären Informationen führt zu falschen Vorhersagen. Die vorgeschlagene Lösung, die Topologie-basierte Suche (TBS), kombiniert die Erforschung des Konformationsraums mit koevolutionären Daten und beschränkt die Suche auf relevante Regionen. In dieser Arbeit wird TBS vorgestellt und seine Wirksamkeit bei der Vorhersage von Beta-Proteinen und Strukturen mit vielen Beta-Resten demonstriert. Sie schlägt breitere Anwendungen für proteinbezogene Probleme vor und bietet einen effizienten Ansatz für Situationen, in denen ko-evolutionäre Informationen fehlen oder nicht informativ sind.
Entdecken Sie AlphaLink, ein revolutionäres Werkzeug für die Proteinforschung. Es ermöglicht die effiziente Vorhersage komplexer Proteinstrukturen und Interaktionen durch die Zusammenführung experimenteller Daten und koevolutionärer Erkenntnisse. Das neuronale Netzwerk von AlphaLink integriert Crosslinking-MS-Daten und ermöglicht es, durch Proteinlandschaften zu navigieren und Vorhersagen zu biologisch relevanten Konformationen zu führen. AlphaLink verwendet Distogramme zur Darstellung von Abstandsinformationen und kombiniert verschiedene experimentelle Einschränkungen, um das Potenzial von Crosslinks bei der Strukturvorhersage aufzuzeigen. Es übertrifft AlphaFold-Multimer bei der Identifizierung von Protein-Protein-Interaktionen und Schnittstellen in mehrkettigen Proteinen. Tests mit realen Daten zeigen eine durchschnittliche Verbesserung des ipTM-Scores um 30%. AlphaLink setzt einen neuen Standard für die prädiktive Proteinmodellierung und hat Auswirkungen auf zukünftige Entwicklungen.
Die Dissertation revolutioniert die Robotik-Bewegungsplanung durch einen innovativen Ansatz, der auf Umgebungsbedingungen basiert. Im Fokus stehen die Herausforderungen hochdimensionaler Suchräume und Ungenauigkeiten in Robotererfassung und -bewegung. Die Arbeit präsentiert wegweisende Lösungen, darunter Sampling-basierte Bewegungsplanungsalgorithmen, eine neue Umgebungsbedingung für das Greifen von nahezu identischen Objekten und die praktische Anwendung von Umgebungsbeschränkungen im Soft Manipulation System. Diese Fortschritte ermöglichen eine effiziente Reduzierung von Zustandsunsicherheiten und verbessern die Bewältigung komplexer Roboterherausforderungen erheblich.
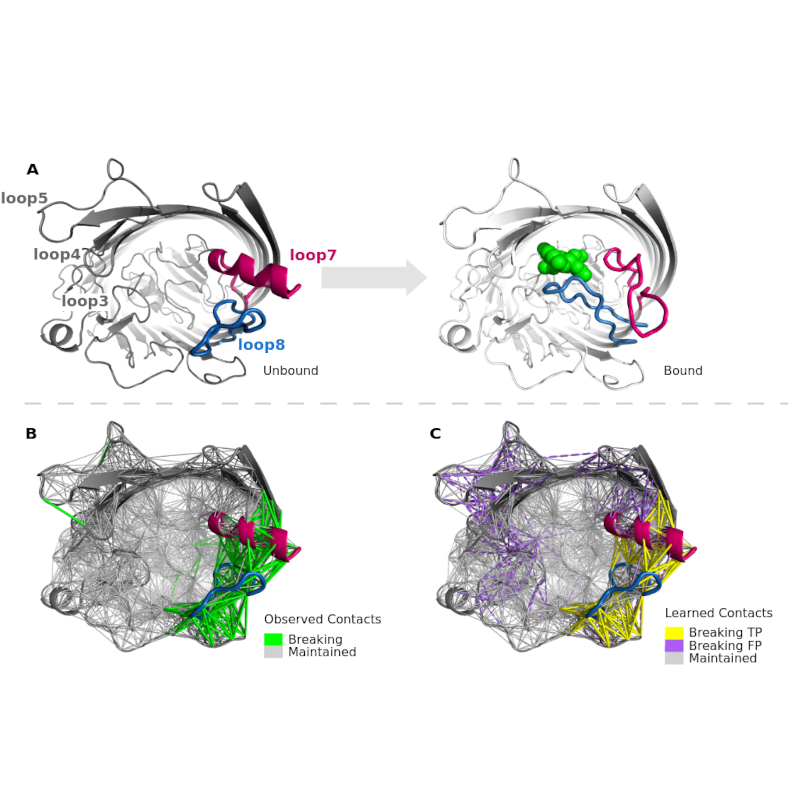
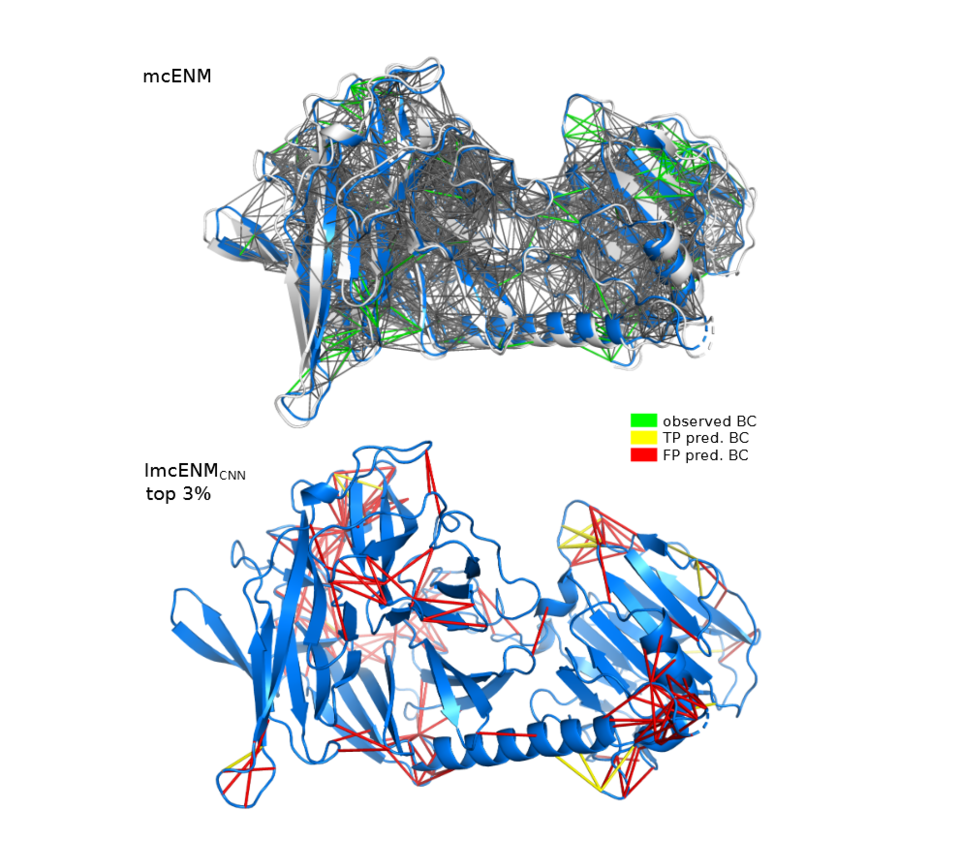
Proteins are involved in almost all functions in our cells due to their ability to combine conformational motion with chemical specificity. Hence, information about the motions of a protein provides insights into its function. This thesis proposes a novel elastic network model of learned maintained contacts, lmcENM. It expands the range of motions that can be captured by such simplified models by leveraging novel information about a protein’s structure.
This thesis contributes to algorithmic approaches for the motion generation problem for mobile manipulators. This problem is unsolved in unstructured environments, where the robot does not have access to precise models but must infer the state of the world with its sensors. In this thesis we do not only explore efficient algorithms for motion planning in free space, but also tackle the problem to plan actions that make contact with the environment.
Greifen ist eine entscheidende Fähigkeit für jedes autonome System, das die physische Welt verändern muss. Die Komplexität des Robotergreifens ergibt sich aus der Tatsache, dass jede Lösung verschiedene Komponenten umfasst: Das Design der Hand, die Steuerung, die Wahrnehmung und die Planung wirken sich alle auf den Erfolg eines Greifvorgangs aus. Abgesehen von der Auswahl von Lösungen für genau definierte industrielle Szenarien ist das Greifen in einer unstrukturierten Umgebung immer noch ein offenes Problem.
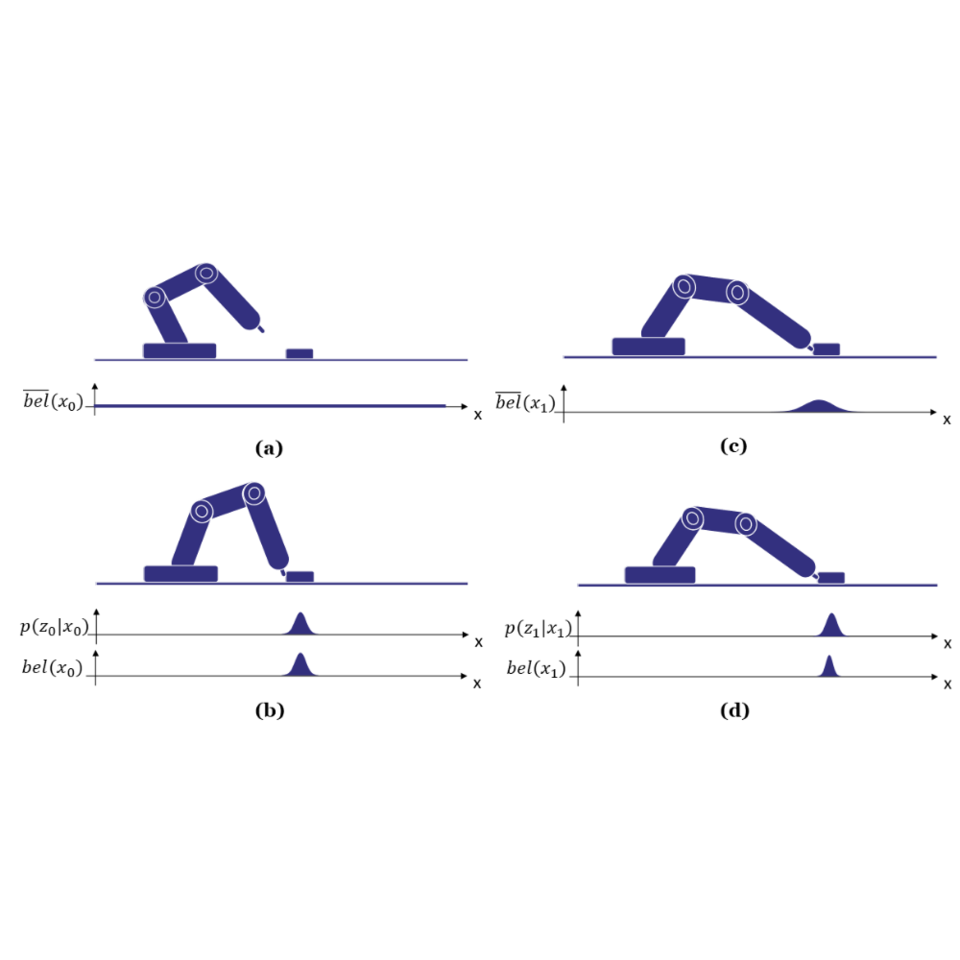
Intelligent robots must be able to learn; they must be able to adapt their behavior based on experience. But generalization from past experience is only possible based on assumptions or prior knowledge (priors for short) about how the world works.
In this thesis, Rico Jonschkowski analyzes different ways in which prior knowledge can be employed to enable robotic perception. The priors used can range from algorithmic priors to loss functions.
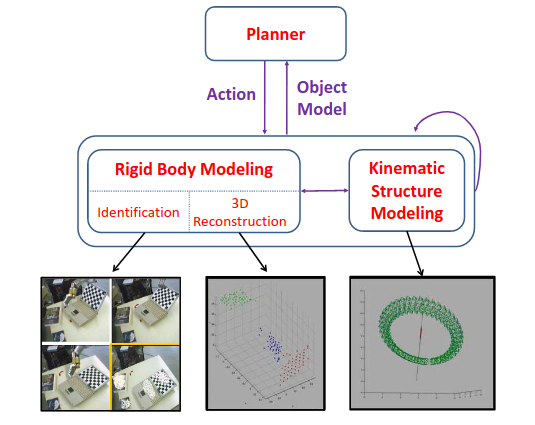
The thesis proposes a general approach for interactive perception to address the challenges in robot mechanical manipulation of kinematic objects in unstructured environments, particularly with articulated objects. The approach leverages the relationship between robot actions and sensor stream changes, temporal structure of physical processes, task-specific priors, and dependencies between perceptual subtasks. The approach is instantiated in several robot perceptual systems to extract kinematic, geometric, and dynamic properties of articulated objects using only RGB-D or a combination of RGB-D and proprioceptive signals. The systems are evaluated in challenging environmental and task conditions, and are complemented with methods to monitor, control, and steer robot interaction based on perceived information. A novel method to generate and select informative actions for interactive perception is also proposed and evaluated.
This thesis focuses on the design and construction of robotic hands and grippers for grasping by autonomous robots. The author proposes a new approach that reconsiders the basic motivation and goals for grasping and advocates for a shift towards a Soft Manipulation paradigm. The study investigates the use of pneumatic soft hands, which enable safe collision with objects, maintain contact under disturbance, and provide many places of contact for a robust grasp. The thesis develops a comprehensive set of tools for rapidly prototyping pneumatic soft hands, including a versatile and easy-to-prototype actuator design named PneuFlex. The study also proposes and validates a fast and stable dynamic simulation model for the simulation of pneumatic soft hands. Experiments with two artifacts show the shape adaptability, grasp dexterity, and suitability of soft hands for implementing grasping strategies that exploit environment constraints for robust execution. Overall, the thesis contributes the groundwork for further research on Soft Manipulation, with a focus on hand hardware, control, and grasping strategies.
Verstärkungslernen ist ein rechnerischer Rahmen, der es Maschinen ermöglicht, aus der Interaktion mit der Umwelt durch Versuch und Irrtum zu lernen. In den letzten Jahren wurde das verstärkende Lernen erfolgreich auf eine Vielzahl von Problembereichen angewendet, darunter auch die Robotik. Der Erfolg von Anwendungen des Verstärkungslernens in der Robotik hängt jedoch von einer Reihe von Annahmen ab, wie der Verfügbarkeit großer Mengen von Trainingsdaten, hochpräzisen Modellen des Roboters und der Umgebung sowie Vorkenntnissen über die Aufgabe.
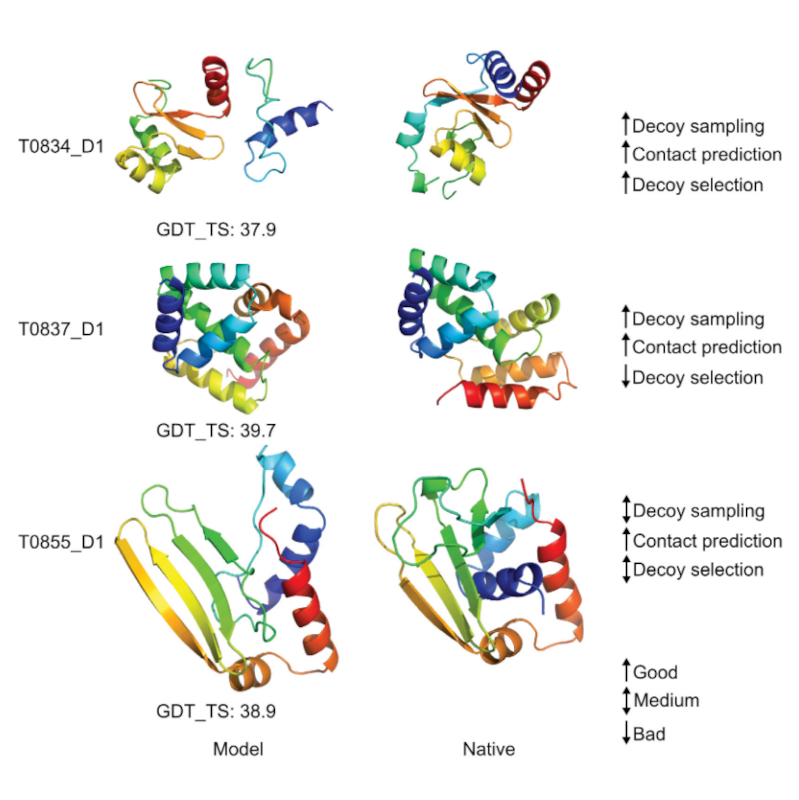
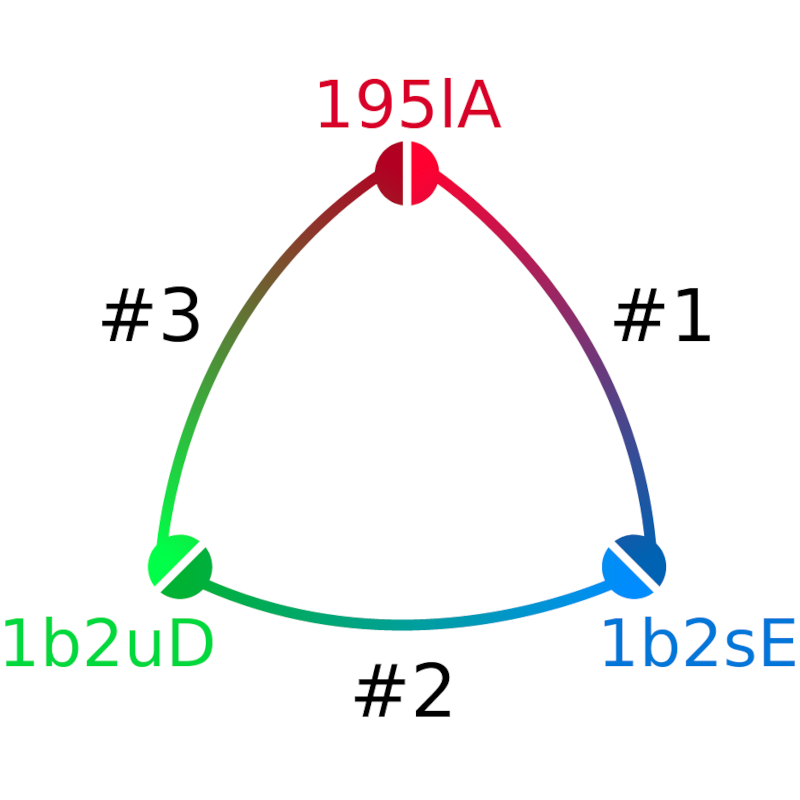
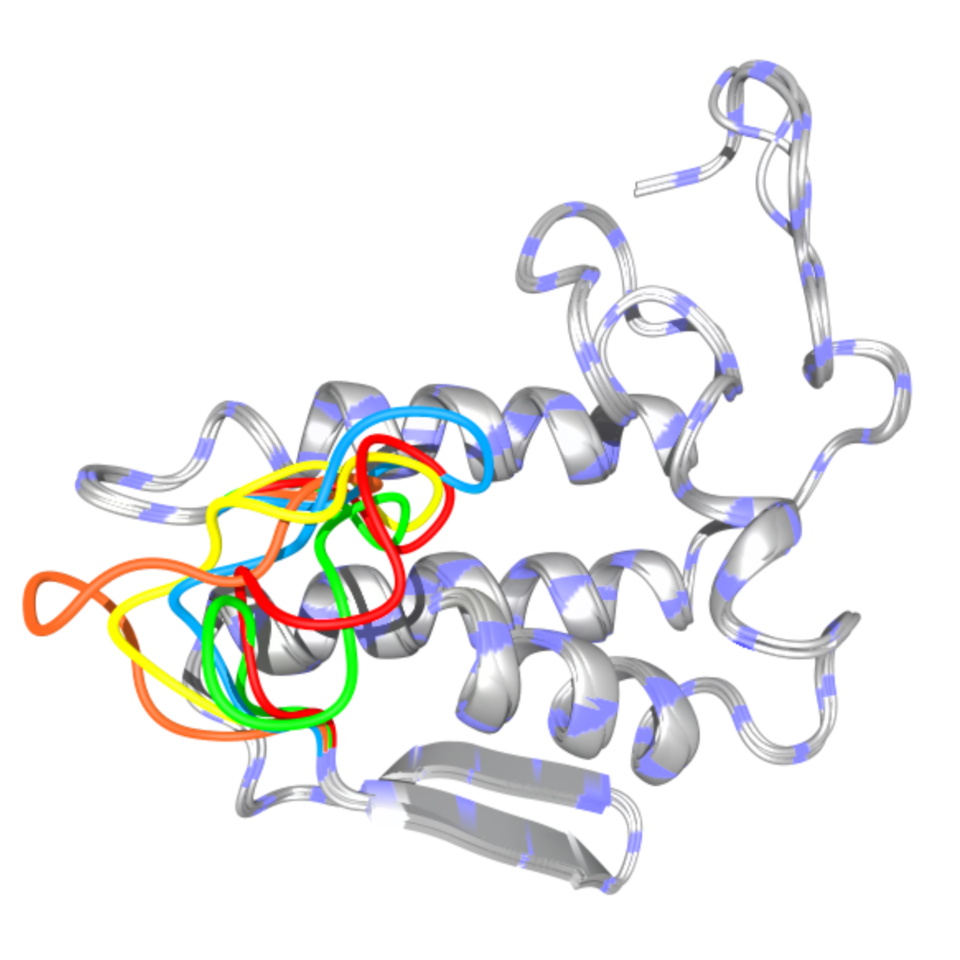
This thesis discusses the challenges of computational protein structure prediction due to the high dimensionality and vast size of the protein conformational space. The authors propose leveraging three novel sources of information, including physicochemical information, experimental data from high-density cross-linking/mass spectrometry experiments, and corroborating information, to advance protein structure prediction. They demonstrate the effectiveness of these methods in extensive ab initio structure prediction experiments, achieving state-of-the-art performance in the Critical Assessment of Protein Structure Prediction experiment. Using their CLMS-based hybrid method, they reconstruct the domain structures of human serum albumin in solution and in its native environment, human blood serum, which represents a disruptive step towards a mass spectrometry-driven, ab initio structure determination method.
Die Hauptmerkmale dieses Systems sind ein hohes Maß an Immersion in die computergenerierte virtuelle Umgebung und ein großes Arbeitsvolumen. Der hohe Grad an Immersion wird durch multimodale Mensch-Exoskelett-Interaktion auf der Grundlage von haptischen Effekten, Audio und dreidimensionaler Visualisierung erreicht. Das große Arbeitsvolumen wird durch eine leichte, tragbare Konstruktion erreicht, die auf dem Rücken des Benutzers getragen werden kann.
In dieser Arbeit werden Roboterfähigkeiten für die Handhabung neuartiger gelenkiger Objekte entwickelt. Die Freiheitsgrade eines gelenkigen Objekts beschreiben die Beziehung
zwischen seinen starren Körpern und sind oft für die beabsichtigte Funktion des Objekts relevant.
Funktion. Beispiele für gelenkige Alltagsobjekte sind Scheren, Zangen, Türen, Türgriffe, Bücher und Schubladen. Die autonome Manipulation von
gelenkigen Objekten ist daher eine Voraussetzung für viele Roboteranwendungen in unserer alltäglichen Umgebung.
Das größte Hindernis für die Vorhersage von Proteinstrukturen ist die Unzulänglichkeit der Konformationsraumsuche. Der Konformationsraum ist zu groß und die Energielandschaft zu zerklüftet, als dass die vorhandenen Suchmethoden durchgängig nahezu optimale Minima finden könnten. Methoden der Konformationsraumsuche müssen sich daher auf die Erforschung eines kleinen Teils des Suchraums konzentrieren. Um domänenspezifische Informationen optimal zu nutzen, muss die Suche für jede Domäne angepasst werden. Der erste Beitrag dieser Arbeit passt die Suche für die Proteinstrukturvorhersage an, was zu wesentlich genaueren Proteinstrukturvorhersagen führt.
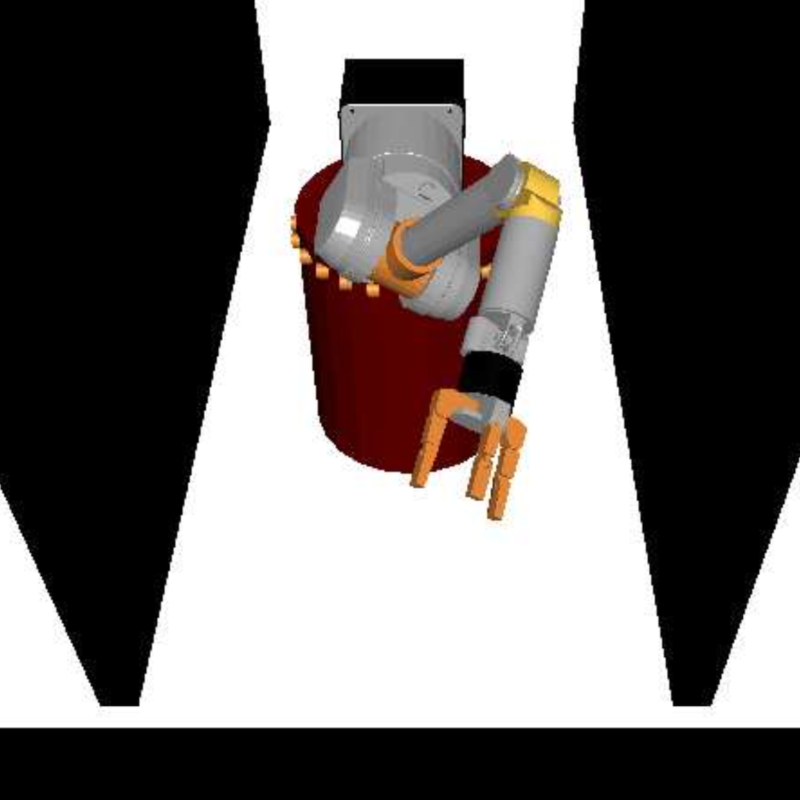
Balancing exploration and exploitation is key to computationally efficient motion planning. The exploring/exploiting tree (EET) planner presents a solution that leverages real-world planning structures to avoid exhaustive searches in high-dimensional configuration spaces. The EET planner utilizes acquired workspace information for effective exploitation and adjusts towards exploration in challenging regions.
In dieser Arbeit wird ein neuer nutzungsgeführter Rahmen für die Bewegungsplanung vorgeschlagen, der zuverlässig kollisionsfreie Bewegungen mit der für die Planung in der realen Welt erforderlichen Effizienz berechnen kann. Der nutzungsgeleitete Ansatz beginnt mit der Beobachtung, dass es eine Regelmäßigkeit im Raum der möglichen Bewegungen gibt, die einem Roboter zur Verfügung stehen. Außerdem sind bestimmte Bewegungen für die Berechnung kollisionsfreier Pfade wichtiger als andere. Zusammen bilden diese Beobachtungen bilden eine Struktur im Raum der möglichen Bewegungen des Roboters.
Involving RGB-D camera, proprioception, and force sensor data, this study examines real-world data fusion methods for robots. It compares diverse fusion architectures, focusing on interrelations between sensors, favoring a potentially resilient feedforward setup without compromising accuracy.
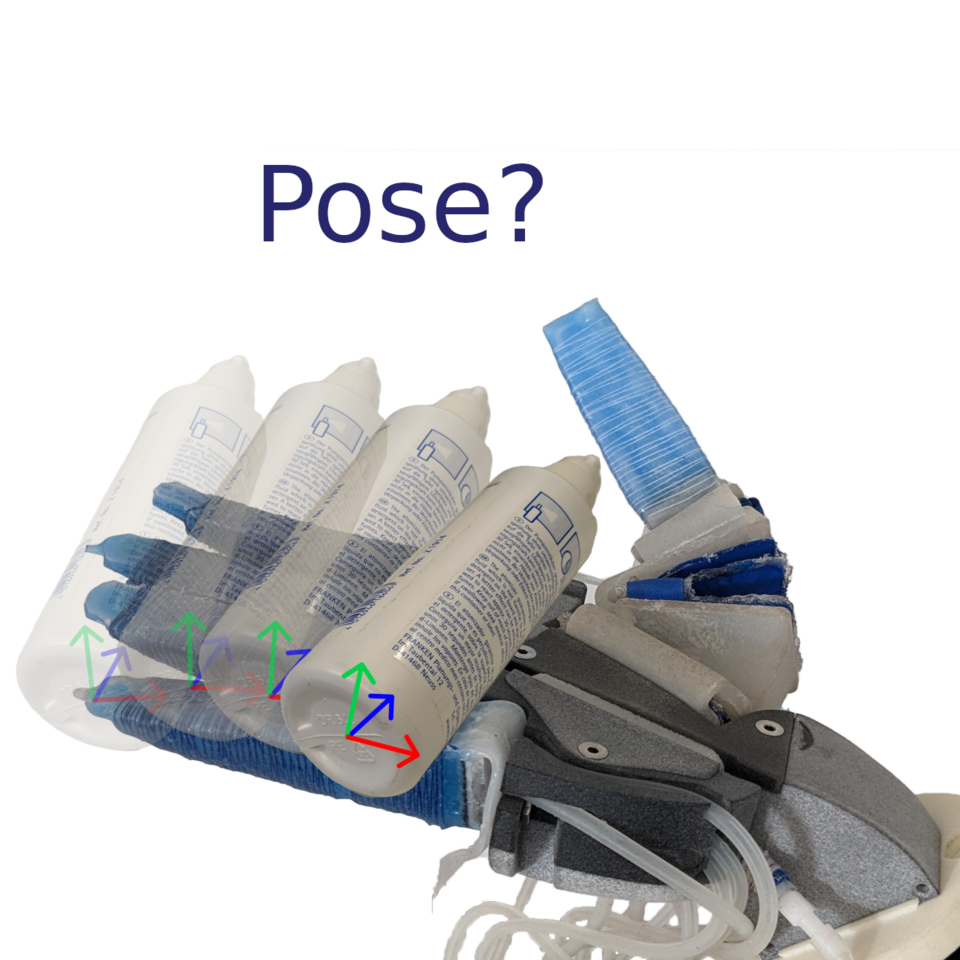
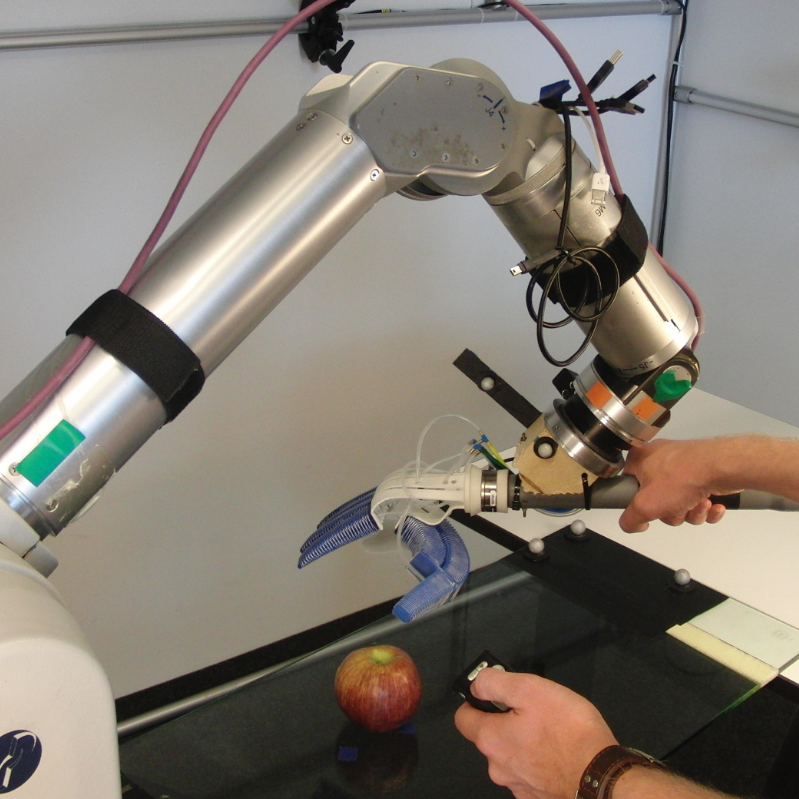
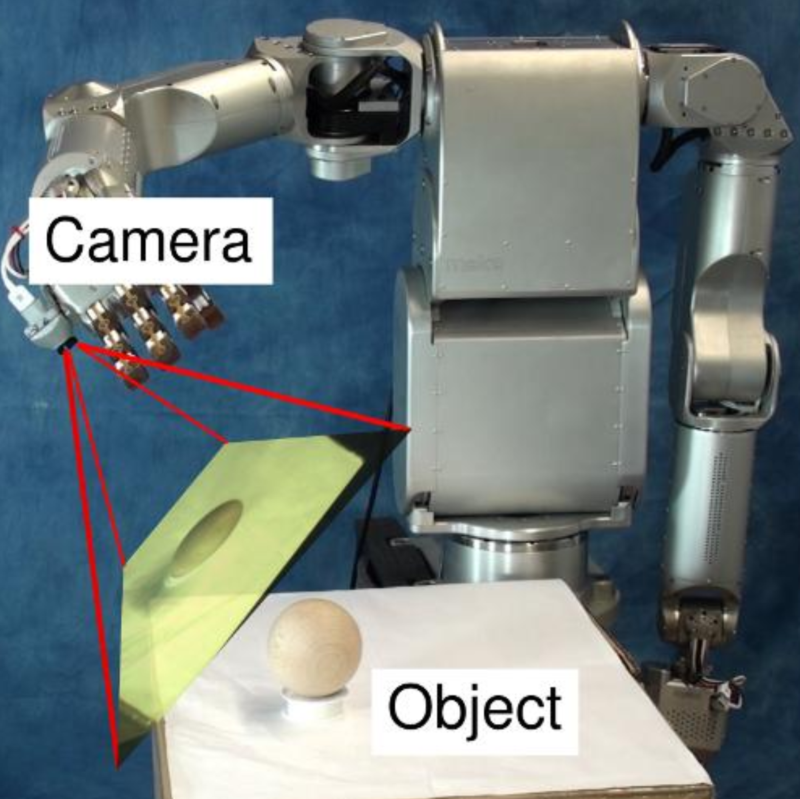
It is very useful if robots know the pose of objects not only when it sees them lying on a table, but also while these objects are grasped. But while objects are grasped, their pose often cannot easily be perceived visually. Either because the hand itself obstructs the view, or because the task requires visual attention elsewhere. Thus we suggest to estimate the in-hand pose of objects using acoustic sensing. This is a novel sensing technique that enables contact estimation.
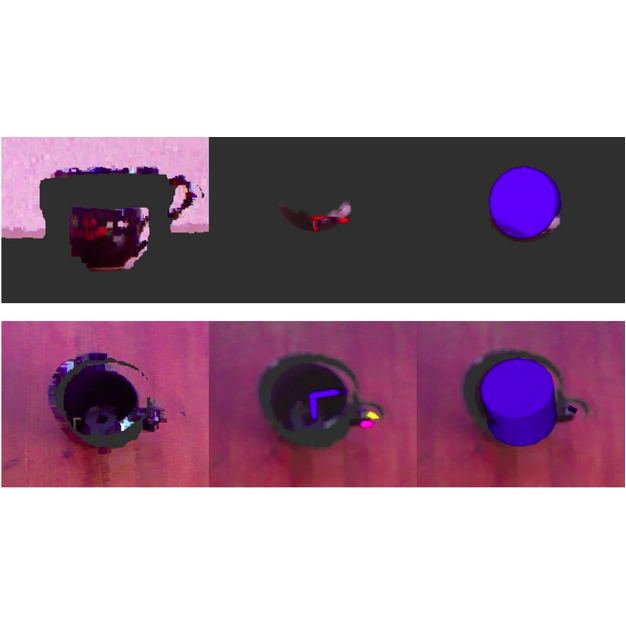
Using DeepLab, a learning-based algorithm for image segmenation, the object of interest is first detected in each image frame of the footage. Combining the segmentation output with a particle filter creates a robust tracking algorithm for tracking the object in the image frame. With a Kalman filter performing sensor fusion on the drone's IMU and GPS sensor, the tracking information in the image frame is used to recreate a global trajectory of the object.
The advantages of wrist movements for hand manipulation have received little attention in robotics. Most approaches use only the capabilities of the fingers of a hand. Humans constantly move their wrist to take advantage of gravity or inertial forces to support the desired manipulation. In this work, we explore the role of external resources (gravity, inertia) in the context of exploiting constraints for hand manipulation.
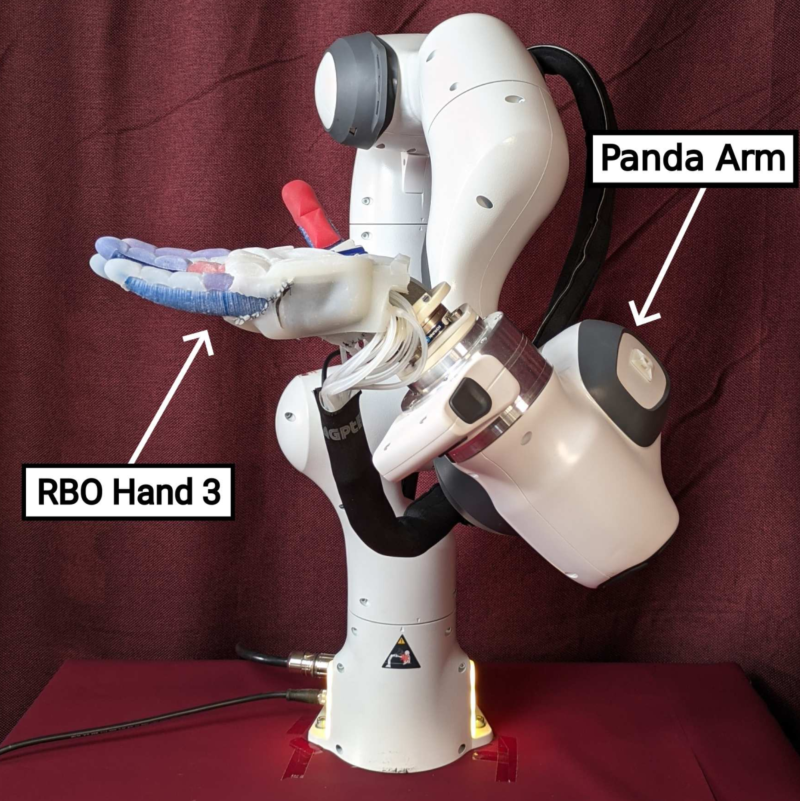
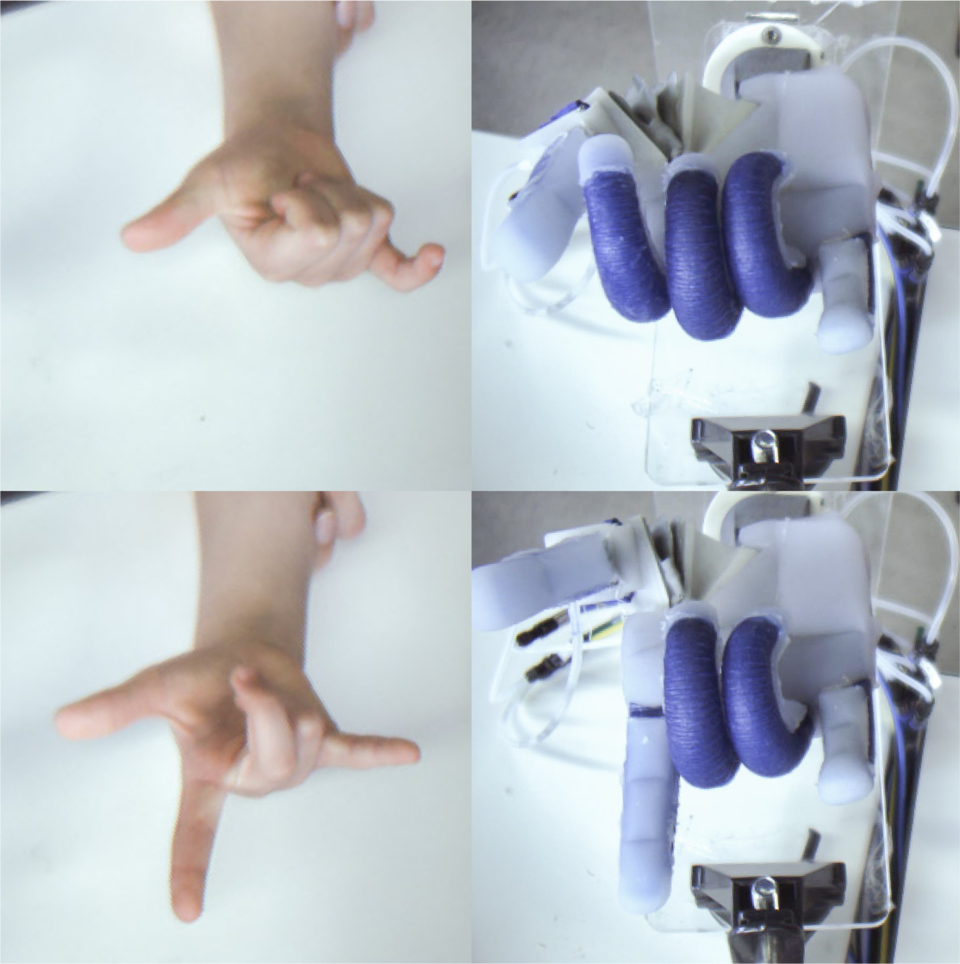
Mithilfe eines handelsüblichen Computer-Vision-Tools werden die Hand- und Handgelenkshaltungen des Benutzers mit mehreren Kameras erfasst und die 3D-Position der Hand anhand eines zugrunde liegenden kinematischen Modells geschätzt, um das Wissen über die menschliche Hand zu nutzen. Beim Wechsel in den Gelenkraum werden die menschlichen Gelenkwinkel auf die RBO Hand 3 abgebildet, zunächst in der Simulation, dann auf der Roboterhand.
The goal of this master's thesis is to analyse how different materials and morphologies can change the grasping and manipulation behavior of soft robot hands. In this thesis you will build robot fingers from different kinds of soft materials and will experiment with different hand morphologies. During the course of this thesis we hope to understand how we can build robot hands that are not only more dexterous, but also more robust in their behavior.
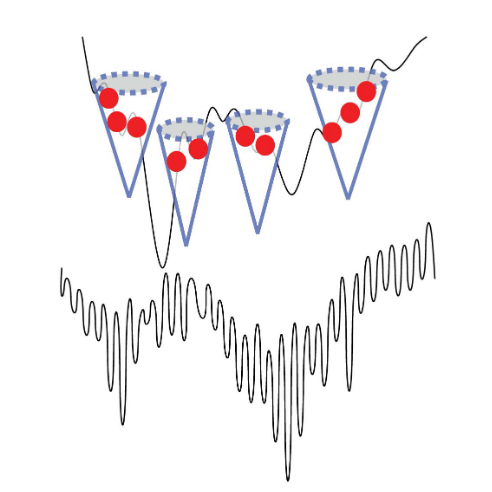
How can robots reliably estimate the state of mechanical objects around them? While visual estimation offers a way to precisely estimate the state of mechanisms such as drawers or doors, visual estimation also has its shortcomings. Occlusions or bad lighting conditions make it challenging or even impossible to tackle this problem just using vision. In this thesis we explore how audio can be used as a sensor modality that augments or even replaces visual estimation in settings that are challenging to vision.
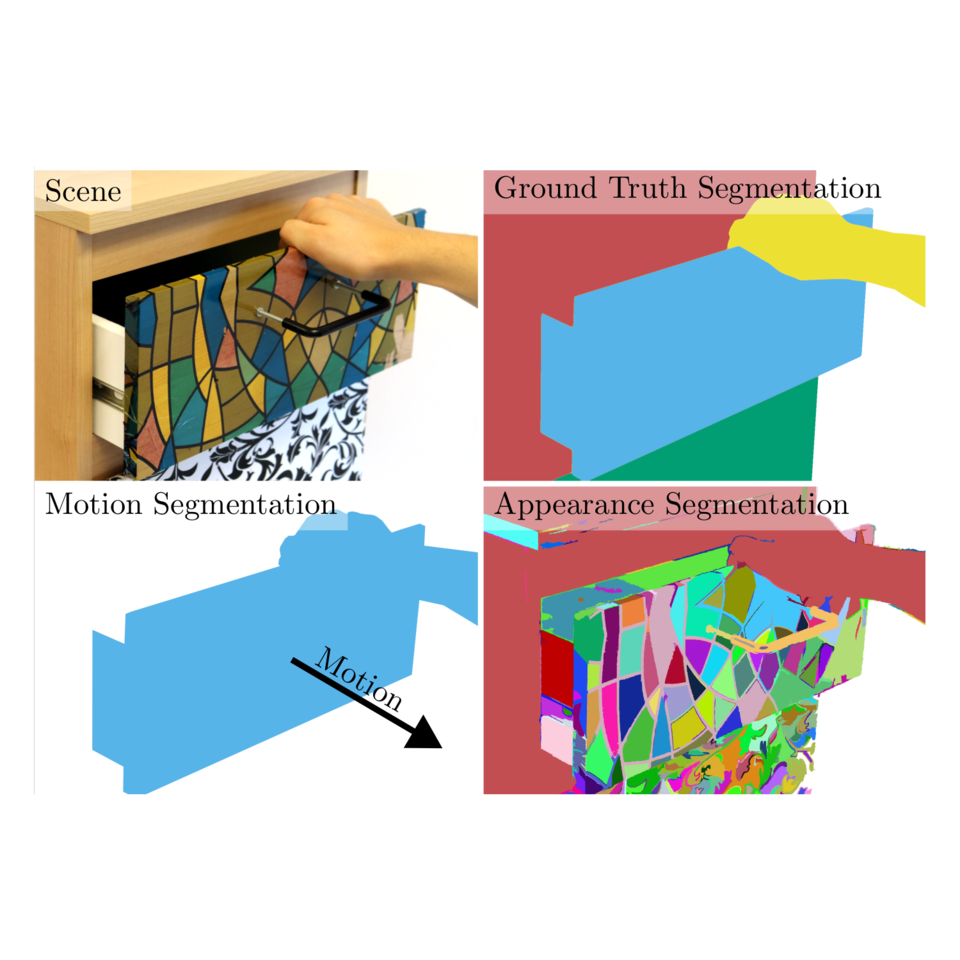
This thesis presents a method for estimating objectness in a visual scene by fusing information from motion and appearance. Two interconnected recursive estimators estimate objectness in a way tailored to kinematic structure estimation. The method shows improved objectness estimation and improvement in estimated kinematic joints. Further analysis provides insight into the connection between objectness and kinematic joints as well interconnected recursive estimation.
The thesis aims to remotely control a soft, pneumatically operated robot hand using a data glove to perform in-hand manipulation. The work involves creating a mapping between the data glove and the RBO-Hand 3 using supervised learning algorithms based on data recorded with the data glove. The learned mapping will be used to teleoperate the RBO-Hand 3, and the resulting teleoperation tool will be used to perform experiments on in-hand manipulation with the RBO-Hand 3. This work contributes to the goal of designing robot hands that resemble the human hand and can adapt their capabilities, particularly for in-hand manipulation.
In collaboration with colleagues from Vienna, researchers are investigating how cockatoos can solve multi-step kinematic puzzles by building models of their behavior, with the goal of improving robots' abilities to explore their environments. The researchers will search for models in the literature and compare them to real bird data to develop a plausible set of hypotheses that could explain the behavior. The thesis developed a taxonomy of models to understand the landscape of potential models in this domain. This work may provide insights into strategies for robots to explore and understand previously unseen kinematic structures in their environment.
When we build soft robotic grippers, we take inspiration from the compliance and softness of the human hand. But what makes the human hand one of the most powerful tools is its sense of touch. Since the sensors established in rigid robotics are not applicable to soft actuators, we need to look at new materials and new fabrication methods. In this paper, we want to present a way to introduce tactile sensors into a soft actuator without limiting its dexterity, using the RBO Hand 3 actuator as an example.
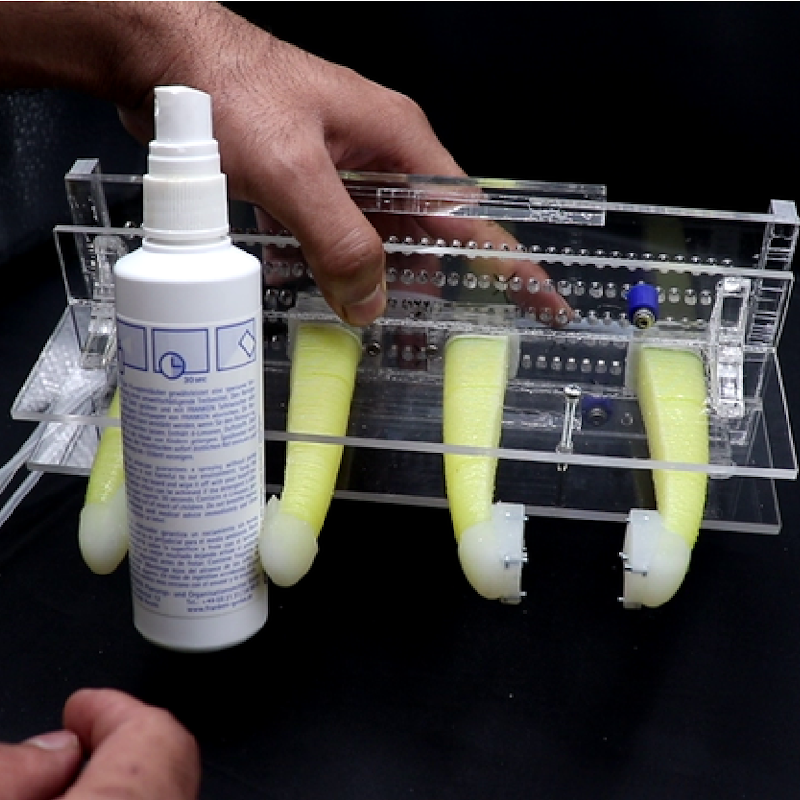
In dieser Arbeit wird ein Kontaktsensor entwickelt und charakterisiert, indem ein bekanntes Geräusch abgespielt und analysiert wird, wie es sich verändert, wenn ein PneuFlex-Aktor ein Objekt auf unterschiedliche Weise berührt.
Robots need to be able to not only grasp objects and to manipulate them on a coarse spatial scale. We also want robots to learn more fine-grained in-hand manipulation skill, such as the skill to rotate and wiggle a pen in-hand. In this thesis we work towards that goal. We research how a soft robotic hand manipulates a grasped object more reliably when we consider the position of the object in a closed-loop controller.
Wir erweitern die Idee der Roboterprioritäten auf nicht markovianische Beobachtungsräume. Zu diesem Zweck trainieren wir ein rekurrentes neuronales Netz auf Trajektorien, so dass das Netz lernt, vergangene Informationen in seinem verborgenen Zustand zu kodieren.
Classical robotic grasping is a sequential process of approaching an object, contacting,and applying forces at desired points for a stable grasp. On the other hand, humans can robustly grasp even without deciding on hand placement on an object and they use wrist movements concurrently with the fingers closure. The thesis explores wrist hand coordination for robust robotic grasping.
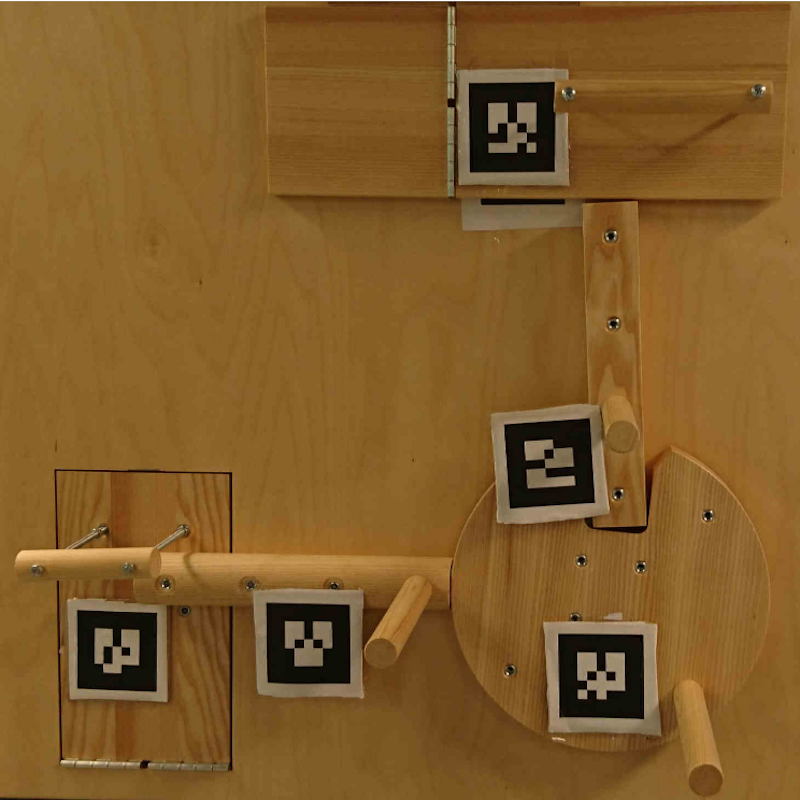
How can a robot explore complex kinematic chains? How can it learn about the kinematic dependencies in such a chain? In this work we developed and tested rule based heuristics and more sophisticated planning methods to explore and manipulate complex kinematic mechanisms in a simulation. In experiments with different, automatically generated lockboxes we evaluated their performance.
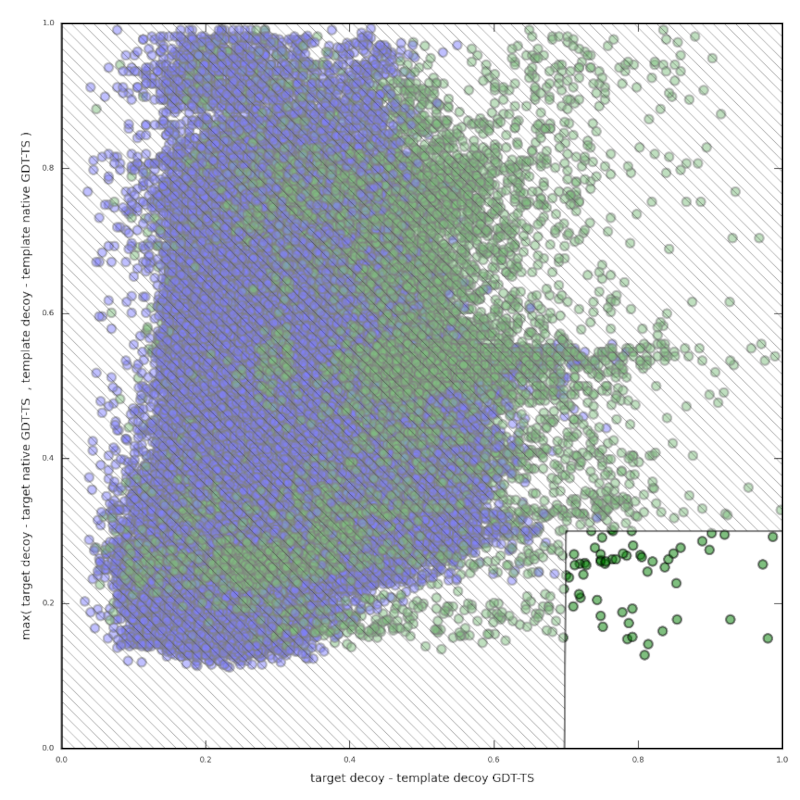
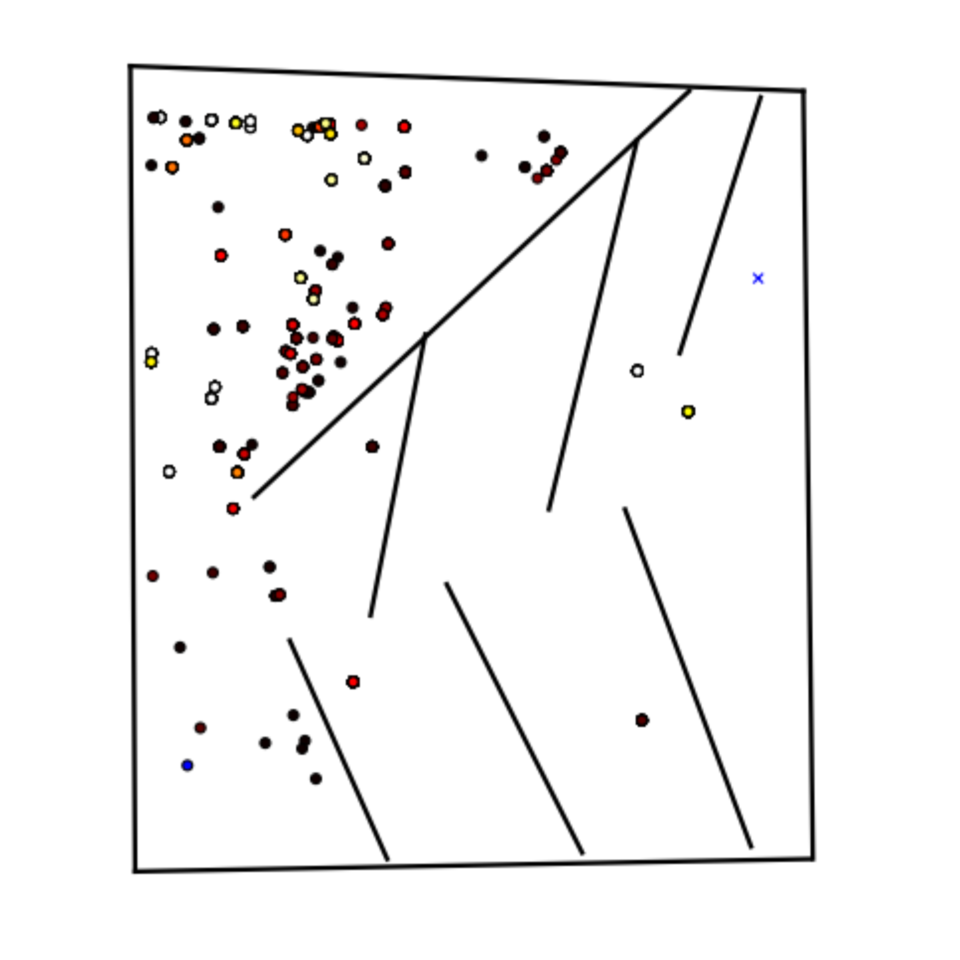
Both experimental and computational methods have limitations in determining protein structures. Comparative modeling is successful when utilizing sequence similarity, but when templates are not available, ab initio modeling can be used. However, this method suffers from the vastness of the search space. To address this, an algorithm combining ab initio and comparative modeling was developed to retrieve templates independent of sequence similarity. This method generates ab initio decoys for all targets and a set of templates and compares them using various metrics. Testing the method on 14 targets showed that the presented method succeeds mainly due to similarities of the decoys to the native structures, with evidence for similar energy landscapes also supporting the approach.
Die meisten Modelle der Kontaktdynamik zeigen ein unrealistisches Verhalten aufgrund von Annahmen, die aus rechnerischen Gründen getroffen wurden. Leider gibt es einen Mangel an experimentellen Arbeiten, um diese Annahmen zu validieren und zu bewerten, wie realistisch diese Kontaktmodellierungsansätze sind, was der Zweck dieser Arbeit ist.
In der evolutionären Berechnung ist eine zielbasierte Zielfunktion in der Regel nicht in der Lage, die lokalen Herausforderungen auf dem Weg zu ihrer Erfüllung zu berücksichtigen und neigt dazu, die Suche vorzeitig konvergieren zu lassen. Daher wird in dieser Arbeit vorgeschlagen, Ziele zu verwenden, die durch verschiedene Aspekte der Interaktion eines Individuums mit der Umwelt definiert sind. mit der Umwelt definiert sind, und ein Auswahlverfahren, das die Suchanstrengungen umverteilt, um Konvergenz zu vermeiden. umzuverteilen, um Konvergenz zu vermeiden.
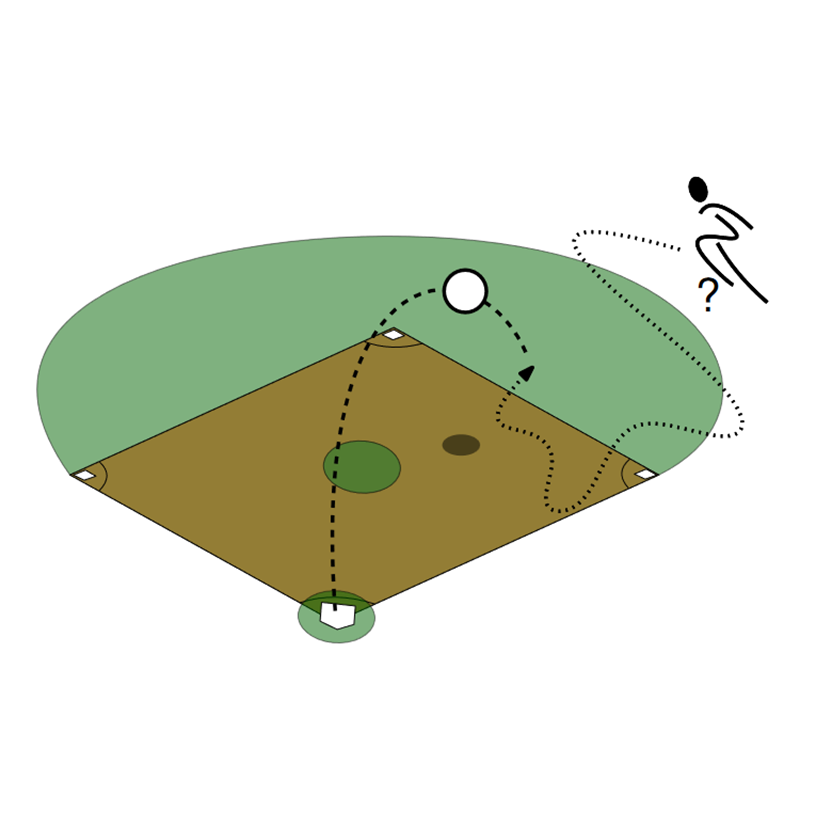
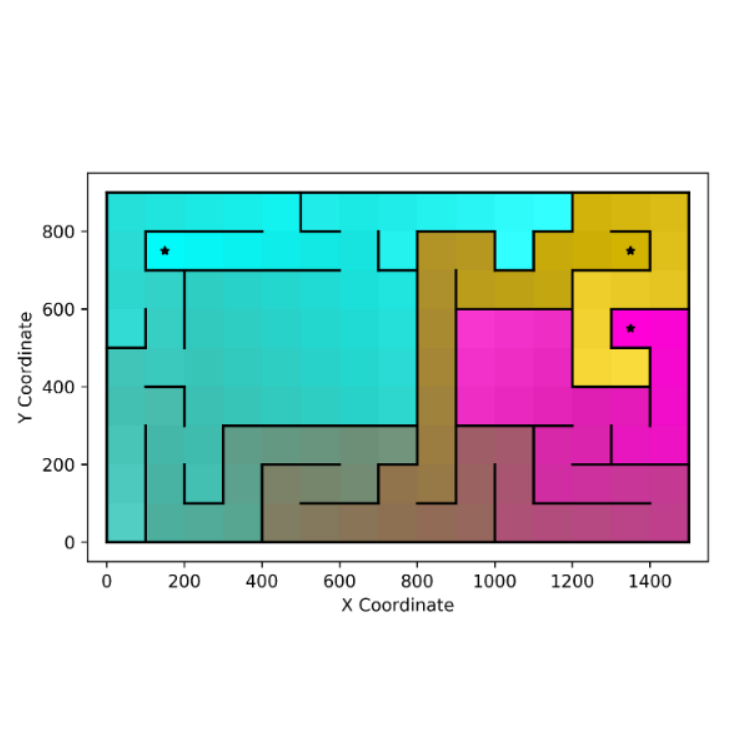
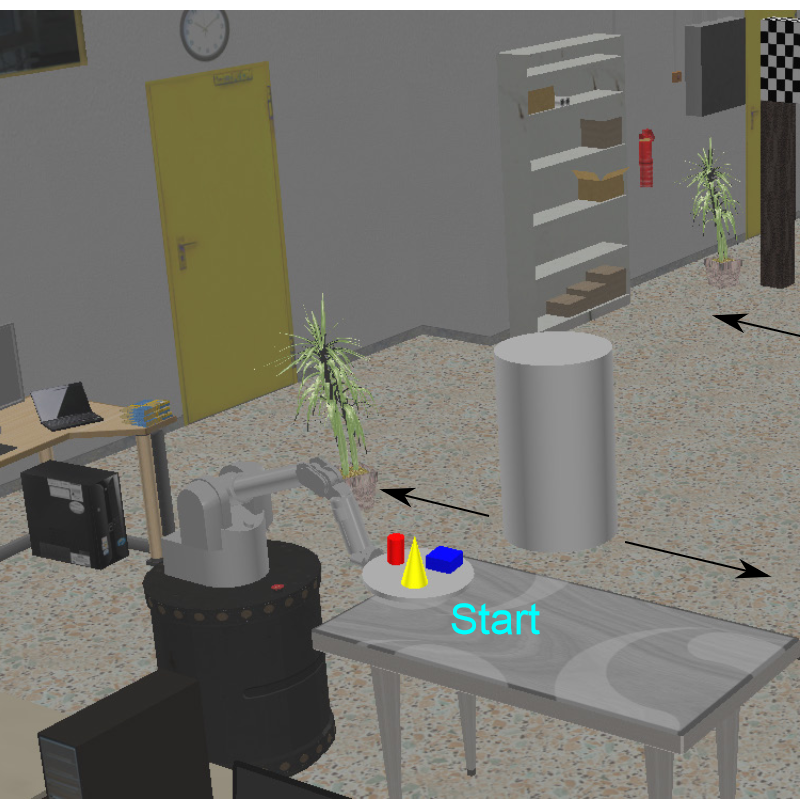
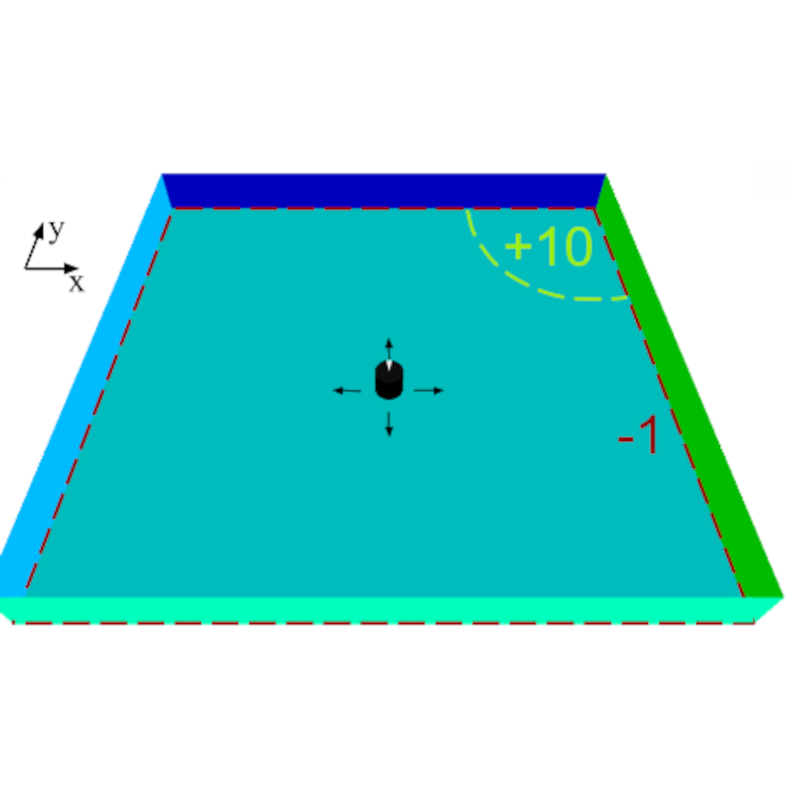
A novel method for efficient object search in realistic environments is presented. Object search is formalized as a probabilistic inference problem, using spatial relations of possible locations. Five physical world priors are identified and incorporated into a probabilistic graphical model. This model combines information for a consistent probability distribution, enabling knowledge propagation for optimal search results. Demonstrated with a simulated searching agent using noisy web knowledge.
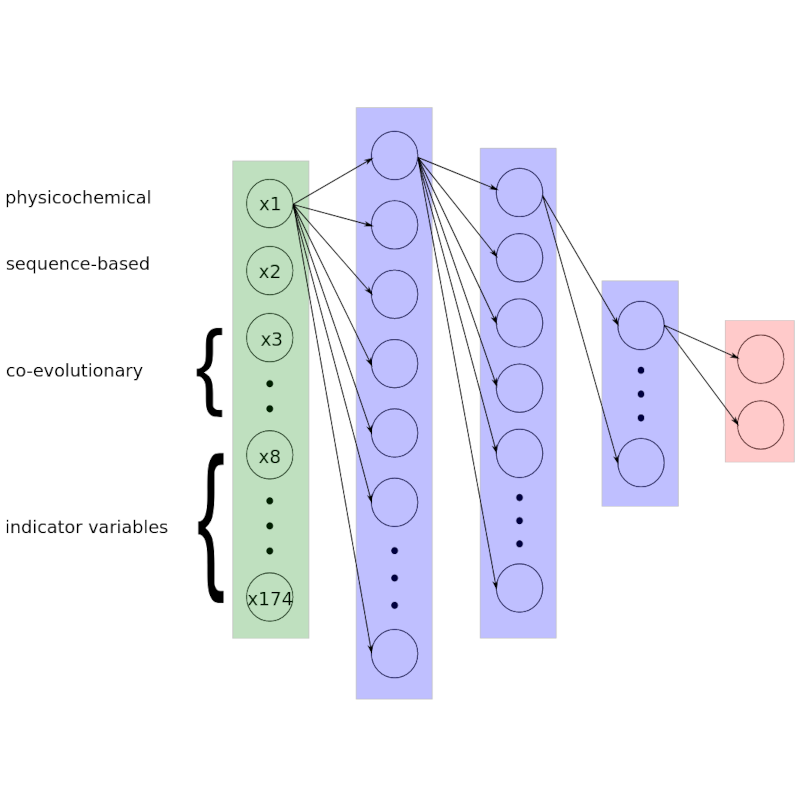
In dieser Arbeit stellen wir einen neuen Kontaktprädiktor vor, der evolutionäre, sequenzbasierte und physikochemische Informationen kombiniert. Der Kontaktprädiktor verwendet einen neuen und verfeinerten Merkmalssatz mit drastisch reduzierter Dimensionalität.
Die interaktive Wahrnehmung nutzt die Fähigkeiten des Roboters, mit der Umgebung zu interagieren, um verborgene Eigenschaften wie die kinematischen Strukturen von gelenkigen Objekten zu erkennen. Wenn der Roboter jedoch mit einer neuen Umgebung konfrontiert wird, muss er entscheiden, wie er interagieren soll, um den Informationsgewinn auf der Grundlage von Sensordaten zu maximieren, und er muss nachgiebige Steuerungen verwenden, die es dem Gelenk ermöglichen, die Bewegung zu steuern.
The flexibility and compliance of soft actuators offer several advantages over traditional, rigid mechanisms. They are inherently safe and light, robust to impact and collision, and can be designed and build quickly at low costs. There are situations, however, in which softness and compliance become a disadvantage. Softness can limit the amount of force an actuator can exert, for example, when lifting a heavy object or when pressing a switch. To alleviate this limitation we propose soft actuators capable of changing their stiffness by employing jamming.
The thesis presents an incremental method for motion generation in environments with unpredictable and initially unknown obstacles. The method locally augments and adapts global motion plans in response to changes in the environment, addressing three sub-problems of motion generation with three algorithmic components. The first component reactively adapts plans in response to small, continuous changes, while the second augments the plan locally in response to connectivity changes. The third extracts a global, goal-directed motion from the representation maintained by the first two components. The proposed method is evaluated in a real-world mobile manipulation experiment, where a robot executes a whole-body motion task in an initially unknown environment, while incrementally maintaining a plan using only on-board sensors.
At the core of robotics research lies the challenge of grasping objects in unstructured environments. But current state-of-the-art approaches fall short in real-world settings. Our lab's project breaks away from tradition by introducing a groundbreaking solution inspired by the "mitten thought experiment". Our strategy combines interactive exploration and perception with a compliance-based control approach, resulting in reliable and successful grasping of a wide range of objects.
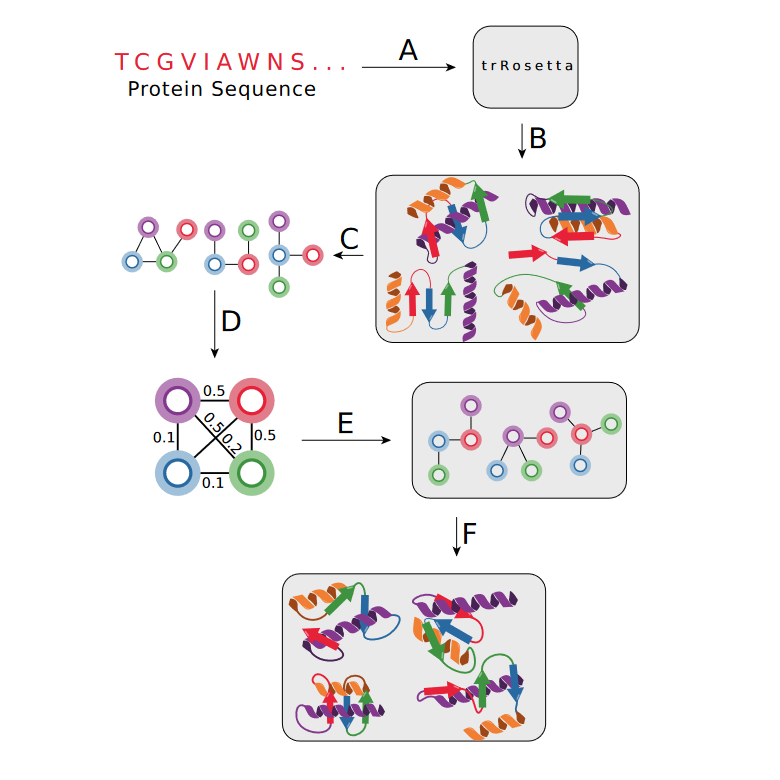
A new approach to protein structure prediction is presented using Building Blocks, which are structurally contiguous motifs. Two algorithms, the foldtree and constraint approach, are introduced to improve prediction using these Building Blocks. Results showed significant improvement over traditional methods, with the constraint approach performing better but having longer run times. This study lays the foundation for future research to solve the protein structure prediction problem.
Die autonome Ausführung mobiler Kopieraufgaben in realen Umgebungen ist eine Herausforderung, da komplexe Bewegungsfähigkeiten, Aufgaben- und Umgebungsbeschränkungen sowie unvorhersehbare Veränderungen erforderlich sind. Herkömmliche Planungstechniken reichen nicht aus, um die Anforderungen an die sensorische Rückmeldung solcher Aufgaben zu erfüllen. Diese Arbeit zielt darauf ab, diese Herausforderungen durch die Erforschung neuer Techniken für das mobile Manipulieren anzugehen.
Discover the secrets of genetic sequences! In this master project, we took on the challenge of identifying relationships between a target sequence and other sets of sequence fragments. By combining simple alignment methods with advanced techniques like sequence profiles and secondary structure prediction, we built a framework for extracting related sets of sequence fragments for a given target sequence. Our journey delved into the depths of genetic sequences and unlocked their potential.
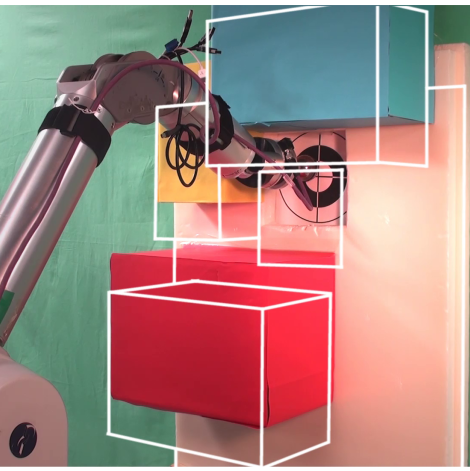
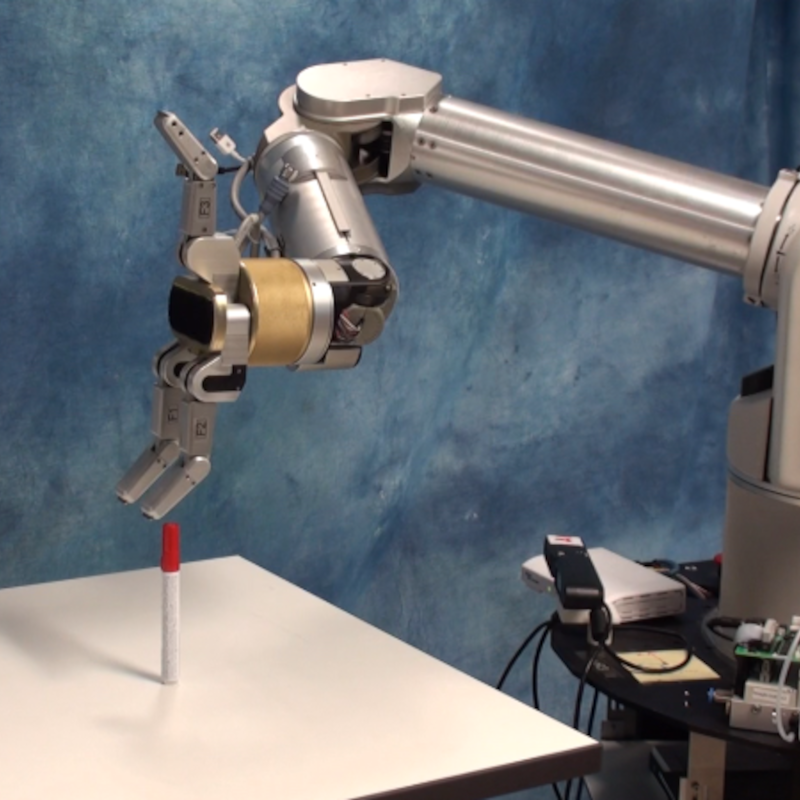
Grasping unknown objects is a crucial aspect in robotics. The human hand's compliance and observation of humans grasping objects suggest that finding the complete hand configuration can be reduced to finding a pre-shape of the hand. The proposed approach uses a 3D depth sensor to extract shape primitives and estimate the object's pose. A simple heuristic finds the best pre-grasp for the object. Experiments have shown that this approach can help a robot grasp a range of objects.
Our study introduces a novel library of "building blocks" for improved protein modeling. By leveraging the dependencies between fragments, our proposed scoring scheme outperforms traditional methods, resulting in 61 targets being covered with 100% near-native building block matches in a recent evaluation. Our innovative approach combines different features and machine learning algorithms for optimal results.
This work aims to investigate coupling methods for a stable, transparent, and plausible interaction with virtual objects having physical dynamics using a wearable haptic interface. The research examines different interaction modes, including pushing, carrying, and throwing, and investigates the possibility of making the virtual object's physical properties, such as their mass and inertia, haptically sensible. The study explores the haptic rendering of rigid body, cloth, and soft body physics using the Nvidia PhysX SDK as the simulation engine. The developed interface between physical simulation and haptic rendering is to be integrated into the current software framework for the wearable haptic device, and the results will be evaluated qualitatively.
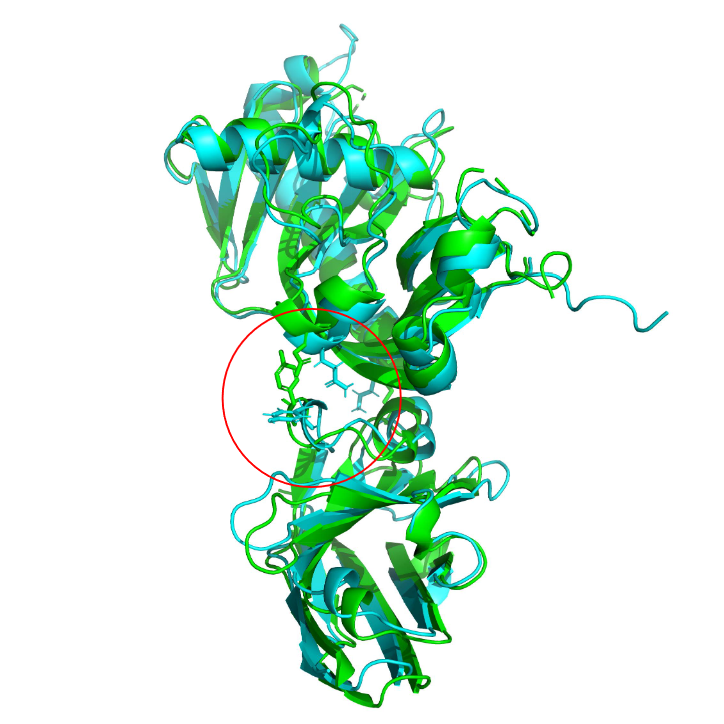
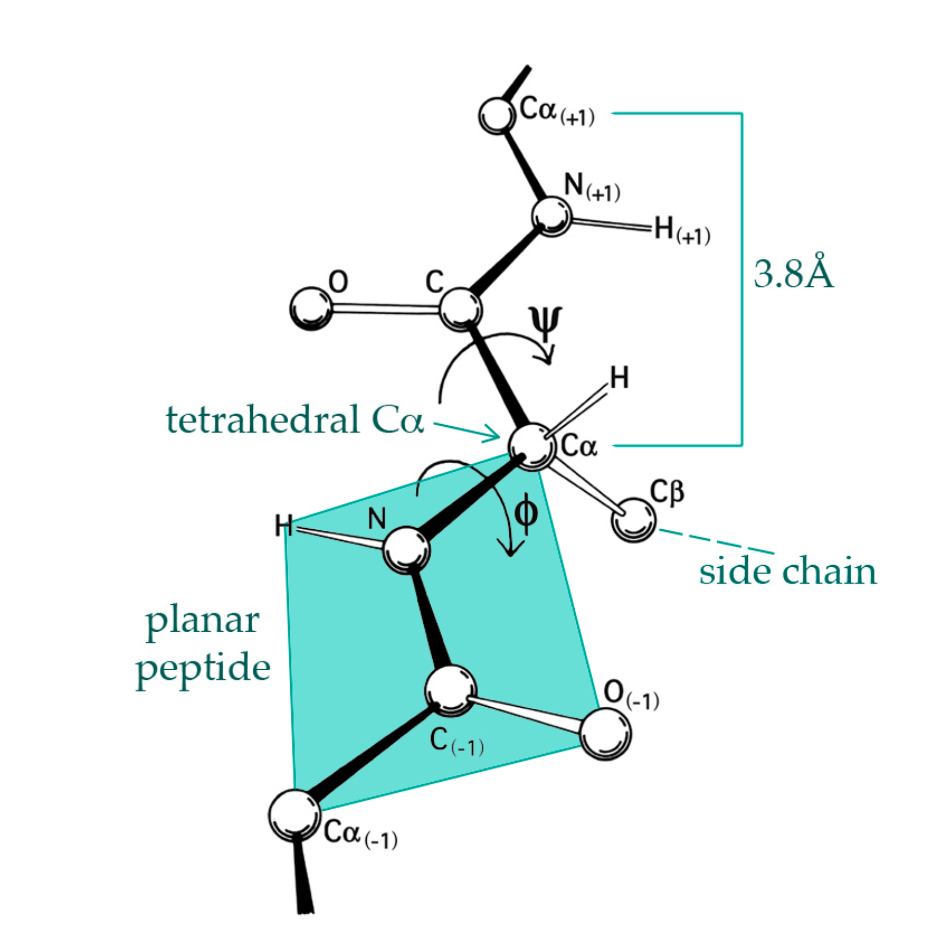
This thesis presents a new approach to the protein loop closure problem in protein structure prediction. The method, inspired by robotics, uses a kinematic chain representation and a motion planning technique to improve conformational sampling. The results of this proof-of-concept study may contribute to more efficient and accurate predictions in the field, and provide a foundation for future advancements in the area.
Air mass control for soft pneumatic actuators is the proper actuation scheme to avoid compromising the intrinsic compliance of the system during control. The enclosed air-mass in a soft system is independent of shape changes during interaction with the environment. In this work, we investigate different data-driven techniques to increase the accuracy of a given air mass controller.
Humans interact with objects in the 3D world robustly without complicated 3D sensors like lidars. Instead they only have 2D sensors in the eyes. If compared (rather naively) to widely available camera sensors, the human retina has vastly diminished capabilities, such as resolution, refresh rate etc. How then can humans interact with the 3D world so robustly?
Air mass control for soft pneumatic actuators is the proper actuation scheme to avoid compromising the intrinsic compliance of the system during control. The enclosed air-mass in a soft system is independent of shape changes during interaction with the environment. In this work, we investigate different airflow sensors to increase the accuracy of our current data-driven approach to air mass control.
Protein motion is crucial for its function, and predicting it is important for drug design. This thesis aims to improve protein motion prediction by applying deep neural networks to breaking contact prediction during structural transitions. Using Elastic Network Models, certain residue pairs become separated, which is important for predicting protein motion. By incorporating this breaking contact information, the prediction accuracy can be improved, and state-of-the-art machine learning techniques will be utilized for this purpose.
Behavior of a soft robot is not exclusively determined by the controller, but also by the interaction of its physical form with the environment. This morphological computation is a core feature of compliant robots. Much research has been done on this field but using morphological computation as a design metric is yet a very novel concept. The goal of this thesis is to apply the concept of a presently published metric to a real world design loop.
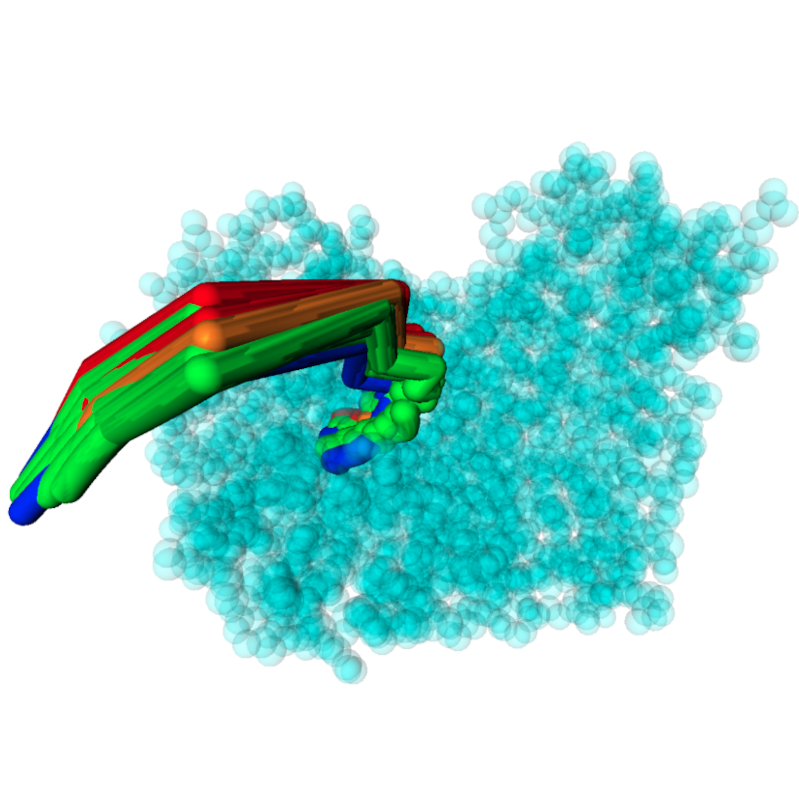
Knowing which ligands can reach a protein's active site is crucial in drug design. Protein-ligand docking is computationally expensive due to high dimensionality of the search space. This work uses partitioning of degrees of freedom and decoupled motion calculations to solve protein-ligand disassembly problems. The Exploring/Exploiting Tree (EET) algorithm is extended to handle internal mobility of ligands and relevant side chains, enabling solutions to interactions where side chains hinder the ligand from exiting the protein. This method makes problems with complex ligands manageable and improves the efficiency of handling internal mobility of ligands.
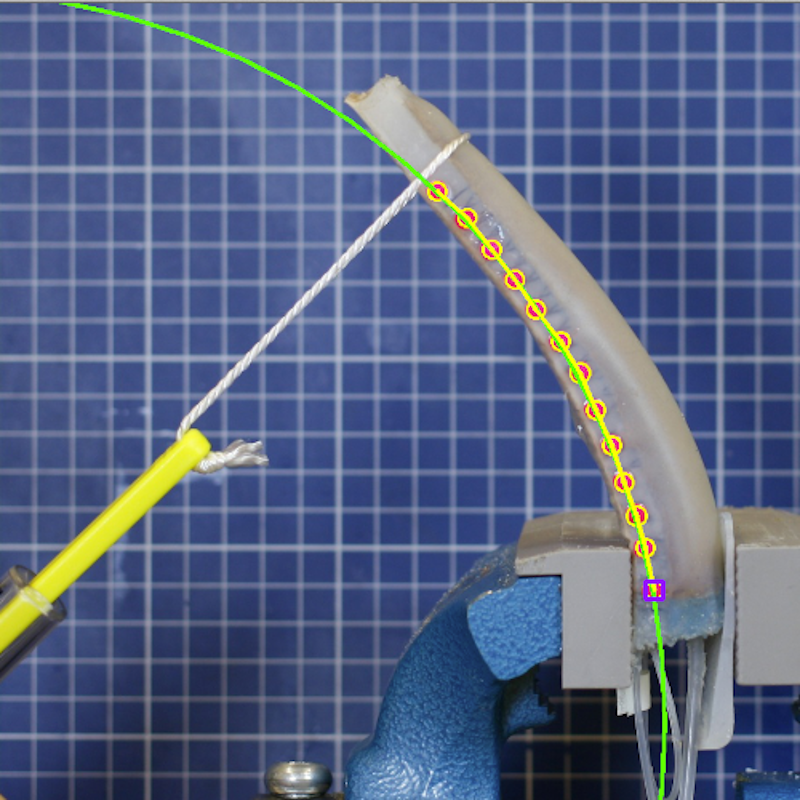
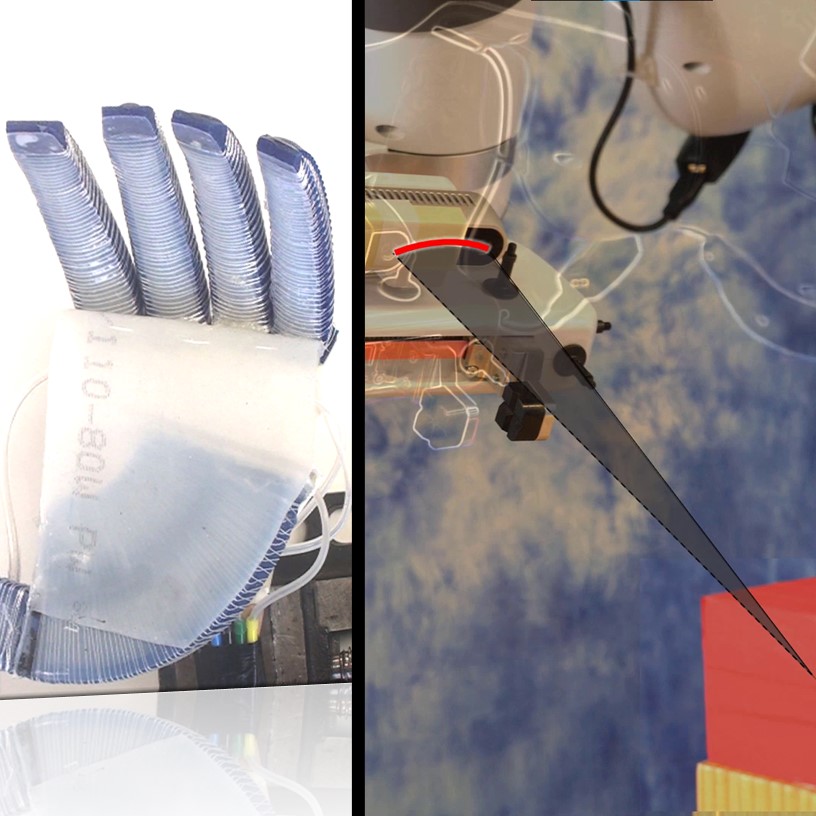
This thesis aims to enable shape sensing of the PneuFlex actuator used in soft robot hands, which has complex deformations due to its soft material. By identifying complex shapes as predictable combinations of simple deformations through machine learning and strain sensor readings, a reduced sensor layout is created to accurately predict deformations and provide insight into the actuator's shape. This research will enable a better understanding of the soft robot hand's behavior during grasping tasks.
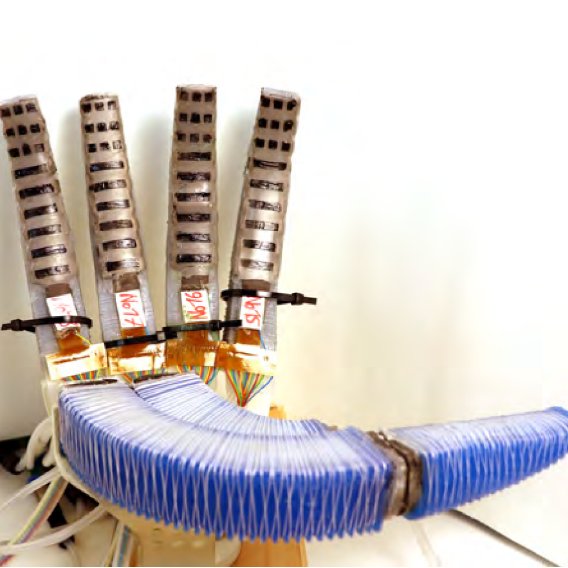
The development of soft hands has led to the need for sensing technology for soft continuum actuators. However, commercially available sensors that can withstand high levels of deformation are not yet available. This thesis evaluates three potential sensor technologies for their suitability in soft hands, focusing on their robustness, ease of use, long term stability, and responsiveness in relation to the challenges of continuously deforming actuators.
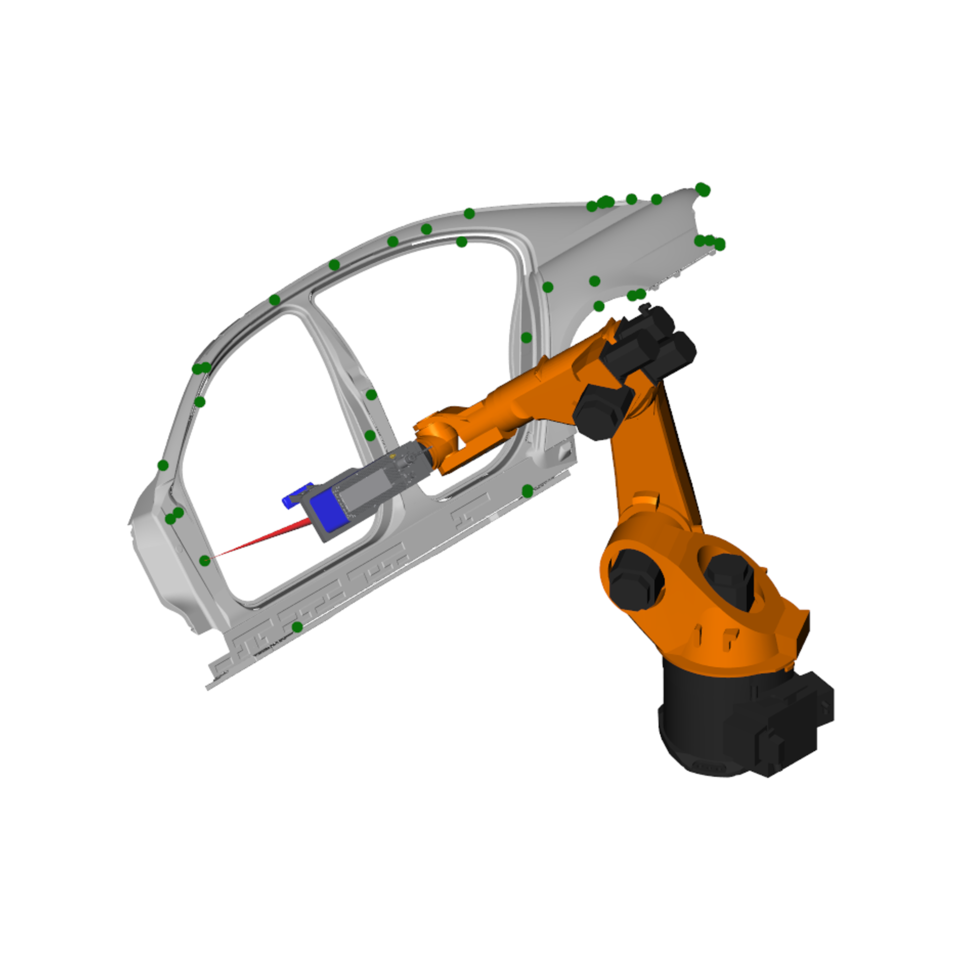
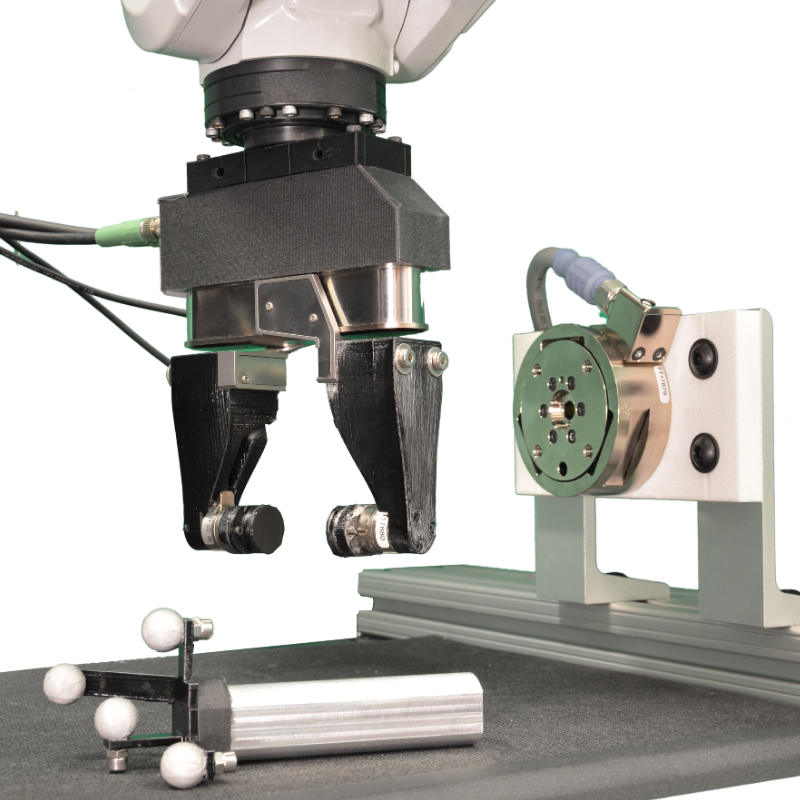
This work focuses on improving the speed and accuracy of robotics grasping through Image Based Visual Servoing (IBVS). Three technical aspects are approached to increase accuracy by tracking kinematic chains and speed by GPU processing and strategic utilization of encoders to focus on important parts of the input image. The most important parameter influencing accuracy and speed of pose estimation is the number of particles in the particle filter used for visual data processing.
This guide aims to encourage practical work with Predictive state representations (PSRs) in robotics. It provides a theoretical background, practical instructions and identifies areas for improvement. The re-implemented algorithm learns a PSR of a simulated mobile robot and experiments validate the accuracy of the learned PSRs. Fine-tuning was found crucial but challenging and the results provide guidance for future work and highlight problems to be addressed for PSR's application to complex real-world domains.
To extend the field of application of robots in unstructured environments it is necessary to develop new techniques of environment perception and interpretation. These methods must give machines the capability to generate sufficient information, which enables them to fulfill their tasks with the aid of their sensors.
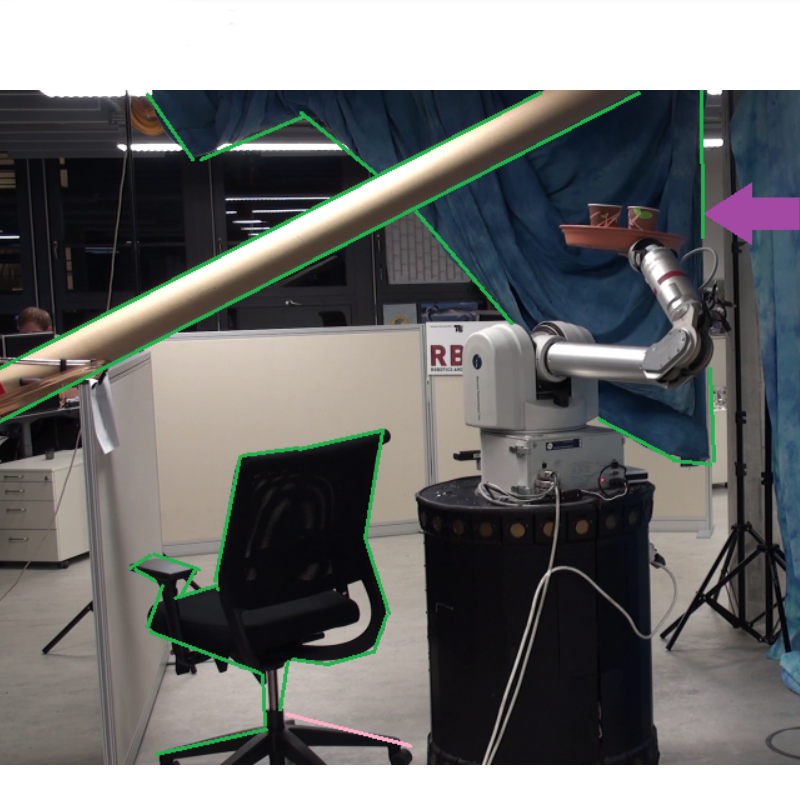
Our cutting-edge solution enables the extraction of kinematic structures from visual sensory input in dynamic environments. Our algorithm classifies relationships within a moving 3D point cloud to determine joint types, offering a reliable and automated process. We validate the stability and effectiveness of this pioneering method through real-world experiments, making a significant contribution to the field of robot technology.
Vision is an important sensory modality for the successful execution of manipulation tasks. This is true for both humans and robots. In this work, we investigate how visual servoing can be used to continuously learn about the properties of objects and their position in the scene. When such information is available, objects in the environment can be approached and manipulated with little prior knowledge.
 © Vincent Wall
© Vincent Wall
 © Mahmoud Mabrouk
© Mahmoud Mabrouk
 © Kolja Stahl
© Kolja Stahl
 © Előd Páll
© Előd Páll
 © RBO
© RBO
 © RBO
© RBO



 © RBO
© RBO

 © Sumit Patidar
© Sumit Patidar







 © RBO
© RBO
 © RBO
© RBO

 © RBO
© RBO

 © RBO
© RBO
 © RBO
© RBO
 © Posifa
© Posifa




 © Sebastian Koch
© Sebastian Koch