EET-Based Motion Planning Applied to Protein-Ligand Interactions
Motivation
Für die Entwicklung von Medikamenten ist es wichtig zu wissen, welche Liganden das aktive Zentrum eines Proteins erreichen können. Diese Liganden sind potenzielle Kandidaten, die das betreffende Protein hemmen oder aktivieren und dadurch eine Krankheit heilen können. Wir werden zeigen, wie die auf Stichproben basierende Bewegungsplanung zur Lösung von Protein-Liganden-Demontageproblemen eingesetzt werden kann.
Beschreibung der Arbeit
Das Protein-Ligand-Docking-Problem ist aufgrund der hohen Dimensionalität des Suchraums rechenintensiv. Wir überwinden dieses Problem, indem wir die Freiheitsgrade (DoFs) in drei Gruppen aufteilen (1 DoFs des Liganden in Bezug auf das Protein, 2 die interne Mobilität des Liganden und 3 die mobilen Seitenketten des Proteins) und eine entkoppelte Bewegungsberechnung für jede Gruppe von DoFs durchführen. Für die Suche erweitern wir den Algorithmus Exploring/Exploiting Tree (EET). Mit EET werden Probleme mit komplexen Liganden handhabbar, da die interne Mobilität der Liganden durch die EET-Version der internen DoFs effizient behandelt wird. Relevante Seitenketten können mit der EET-Seitenkettenversion ausgewählt und simuliert werden, so dass wir Protein-Ligand-Wechselwirkungen lösen können, bei denen Seitenketten den Liganden daran hindern, das Protein zu verlassen.
Ergebnisse
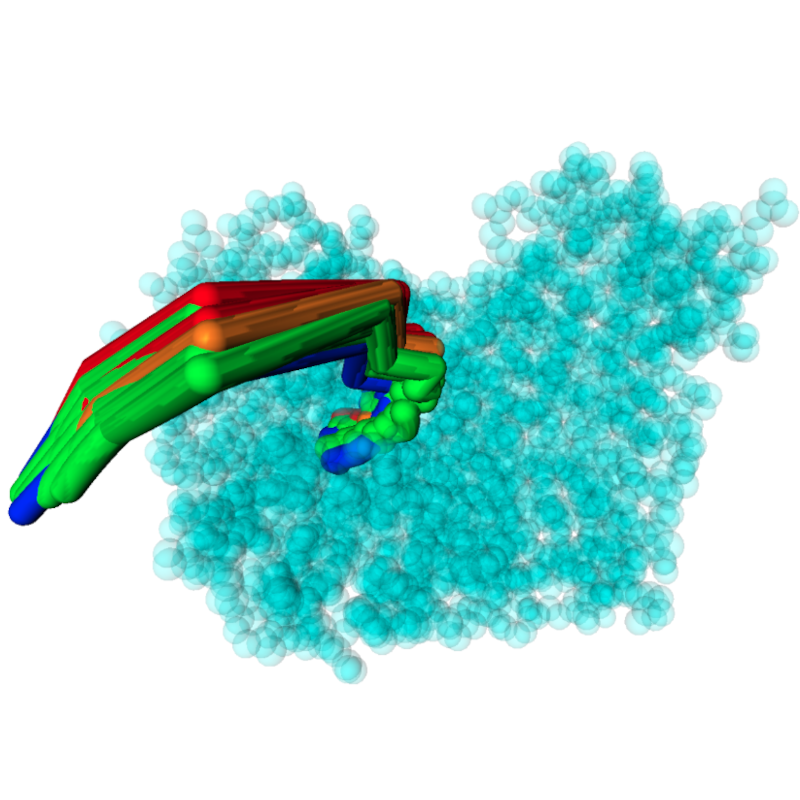
Wir identifizieren drei Gruppen von Freiheitsgraden für das Problem und kommen zu dem Schluss, dass die Bewegung für diese Gruppen einzeln berechnet werden sollte. Die drei Gruppen bestehen aus den Freiheitsgraden des Liganden in Bezug auf das Protein, der internen Mobilität des Liganden und den mobilen Seitenketten des Proteins. Eine erweiterte Version des Exploration/Exploitation Tree Planers setzt diese Überlegungen um. Mit diesem Ansatz lassen sich mehrere medizinisch relevante Protein-Ligand-Interaktionen effizient lösen.