
Xing Li
Forschungsinteressen
Hallo, mein Name ist Xing Li. Ich bin Doktorand an der Technischen Universität Berlin unter der Betreuung von Professor Oliver Brock. Ich bin mit dem Exzellenzforschungscluster Science of Intelligence in Berlin verbunden.
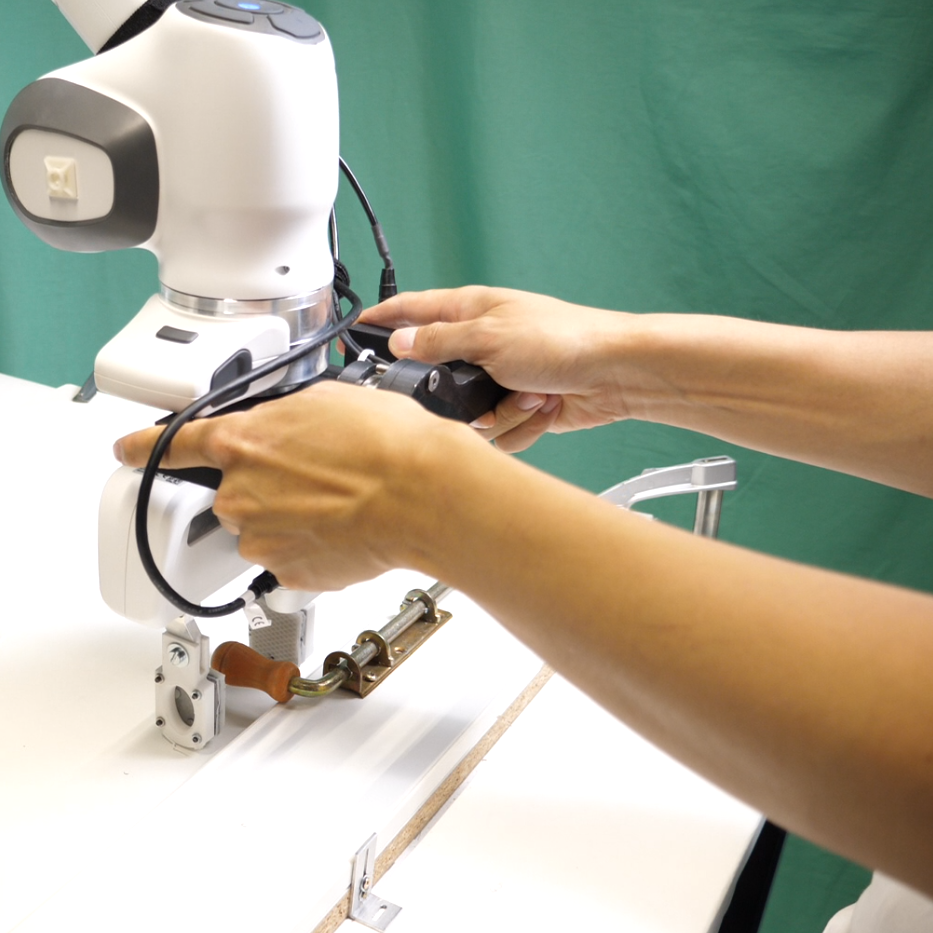
Mein Forschungsinteresse liegt in der Entwicklung eines hochmodernen Systems, das es Nicht-Experten ermöglicht, Robotern mühelos komplexe Fähigkeiten durch Demonstrationen beizubringen. Ich unterscheide mich von anderen Forschungsarbeiten auf diesem Gebiet, indem ich mich darauf konzentriere, den Roboter mit der Fähigkeit auszustatten, effizient mit der Umgebung unter der Anleitung menschlicher Demonstrationen zu interagieren, um zusätzliche Daten zu generieren und das Potenzial der Verkörperung des Roboters zu nutzen. Ich glaube, dass diese geführte Interaktion der Schlüssel zur Überbrückung der Kluft zwischen der menschlichen und der Roboterwahrnehmung ist. Ich hoffe, dass meine Forschung einen Beitrag zur Robotikgemeinschaft leisten kann, indem sie den Zugang zu Robotern erleichtert und sie zu einem Teil der alltäglichen Haushaltsumgebung für jedermann macht.
Kurzlebenslauf
- 2020 - heute
- Doktorand am Robotics and Biology Laboratory (Oliver Brock), TU Berlin
- 2020 - heute
- Mitglied des Exzellenzclusters Science of Intelligence
- 2017 – 2020
- Mechatronics and Information Technology, MSc, Karlsruhe Institute of Technology
- 04.2019 - 05.2020
Praktikum and Masterarbeit, Volkswagen Group Research, Wolfsburg
Thema: Learning from Demonstration for Trajectory Planning in Automated Driving - 11.2018 - 03.2019
Studentischer Beschäftigter, Intelligent Process Automation and Robotics Lab, Karlsruhe - 11.2017 - 10.2018
Studentischer Beschäftigter, Vector Informatik GmbH, Karlsruhe
- 04.2019 - 05.2020
- Mechatronics and Information Technology, MSc, Karlsruhe Institute of Technology
- 2012 – 2016
- Automotive Engineering, BSc, Chang'an University
- 02.2016 - 06.2016
Praktikum , Daimler Greater China Ltd., Beijing
- 02.2016 - 06.2016
- Automotive Engineering, BSc, Chang'an University
Publikationen
2023
Li,
Xing;
Baum,
Manuel;
Brock,
Oliver
Augmentation Enables One-Shot Generalization In Learning From Demonstration for Contact-Rich Manipulation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
Augmentation Enables One-Shot Generalization In Learning From Demonstration for Contact-Rich Manipulation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
2022
Li,
Xing;
Brock,
Oliver
Learning From Demonstration Based on Environmental Constraints
IEEE Robotics and Automation Letters, 7 (4) :10938-10945
2022
Learning From Demonstration Based on Environmental Constraints
IEEE Robotics and Automation Letters, 7 (4) :10938-10945
2022
2020
Rosbach,
Sascha;
James,
Vinit;
Großjohann,
Simon;
Homoceanu,
Silviu;
Li,
Xing;
Roth,
Stefan
Driving Style Encoder: Situational Reward Adaptation for General-Purpose Planning in Automated Driving
2020 IEEE International Conference on Robotics and Automation (ICRA), Page 6419-6425
2020
Driving Style Encoder: Situational Reward Adaptation for General-Purpose Planning in Automated Driving
2020 IEEE International Conference on Robotics and Automation (ICRA), Page 6419-6425
2020
Rosbach,
Sascha;
Li,
Xing;
Großjohann,
Simon;
Homoceanu,
Silviu;
Roth,
Stefan
Planning on the fast lane: Learning to interact using attention mechanisms in path integral inverse reinforcement learning
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Page 5187-5193
2020
Planning on the fast lane: Learning to interact using attention mechanisms in path integral inverse reinforcement learning
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Page 5187-5193
2020