 © RBO
© RBO
Manuel Baum

Forschungsinteressen
Ich interessiere mich für interaktive Wahrnehmung und aufgabenorientierte Erkundung, zwei verwandte und zutiefst robotertechnische Probleme.
Interaktive Wahrnehmung ist wichtig, da nicht alle Informationen, die für einen Agenten relevant sind, einfach durch das Betrachten der Welt verfügbar sind. Der Agent muss Kräfte ausüben und mit der Welt interagieren, um herauszufinden, was relevant ist, z. B. das Gewicht eines Objekts oder die Freiheitsgrade einer kinematischen Struktur. Da der Agent weiß, welche Aktionen er durchgeführt hat, um Sensordaten zu erzeugen, kann er diese Informationen nutzen, um seine Eingaben zu interpretieren.
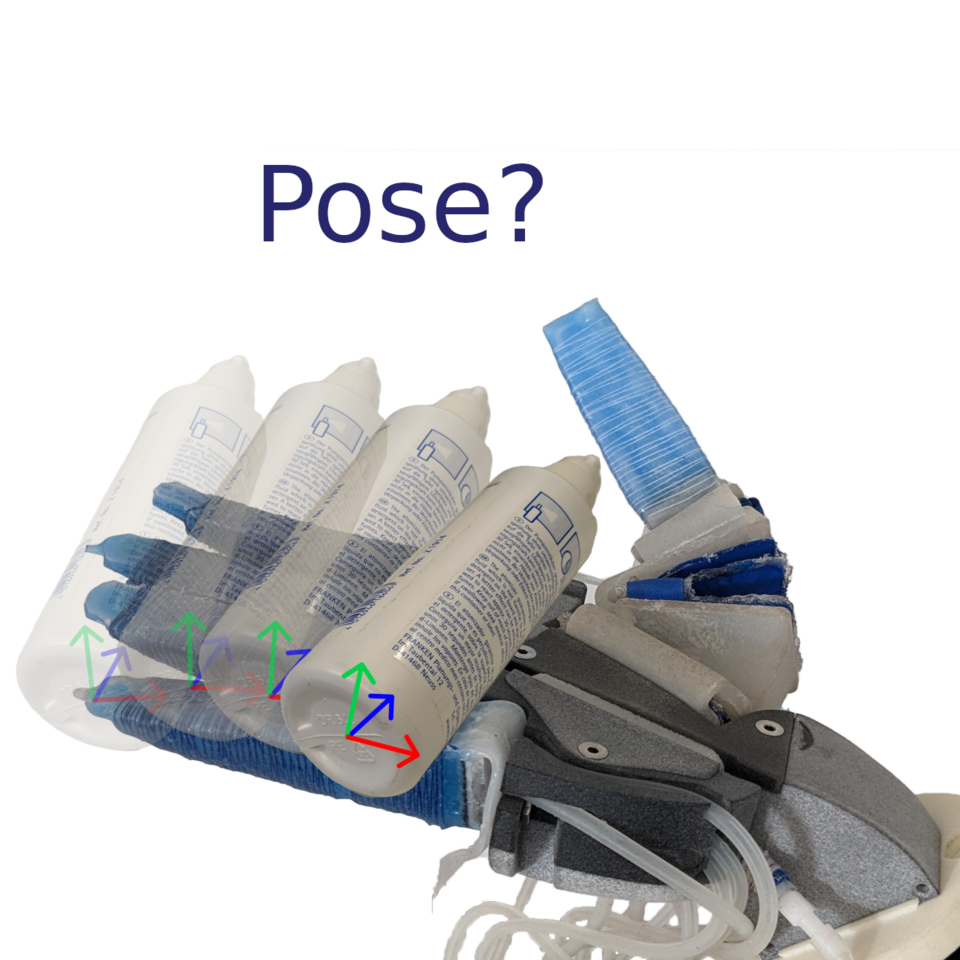
Die Welt ist komplex, aber Roboter werden in der Regel eingesetzt, um eine Reihe von Aufgaben zu lösen, für die sie nur eine Teilmenge der Welt kennen müssen. Deshalb ist es wichtig, die Umgebung nicht wahllos zu erkunden, sondern eine aufgabenorientierte Erkundung durchzuführen. Aber wie findet man heraus, welche Informationen für eine Aufgabe tatsächlich relevant sind? Und wie können wir diese Informationen sammeln? Diese Fragen möchte ich in meiner Forschung beantworten.
Kurzlebenslauf
2015 - heute: Doktorand bei RBO & SCIoI
2011 - 2015: MSc Intelligent Systems an der Universität Bielefeld
2008 - 2011: BSc Cognitive Informatics an der Universität Bielefeld



 © RBO
© RBO
Publikationen
2023
Li,
Xing;
Baum,
Manuel;
Brock,
Oliver
Augmentation Enables One-Shot Generalization In Learning From Demonstration for Contact-Rich Manipulation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
Augmentation Enables One-Shot Generalization In Learning From Demonstration for Contact-Rich Manipulation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
Mengers,
Vito;
Battaje,
Aravind;
Baum,
Manuel;
Brock,
Oliver
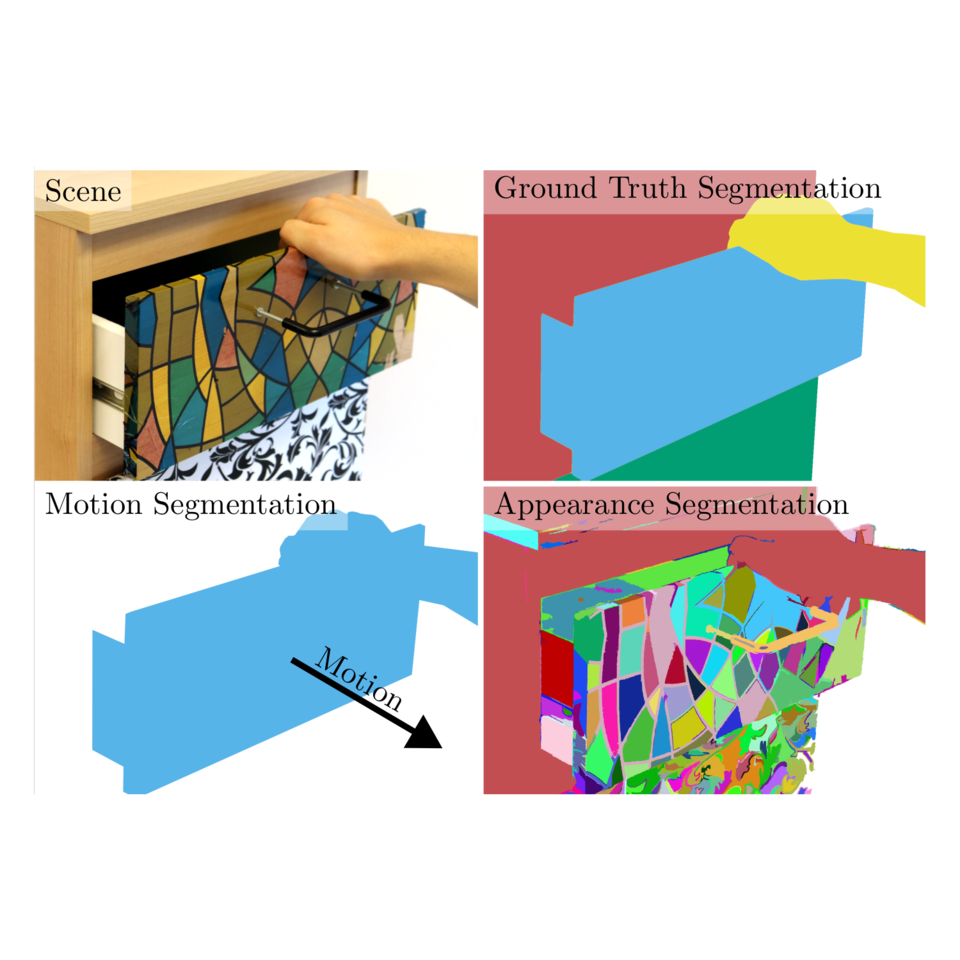
Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time
2023 IEEE International Conference on Robotics and Automation (ICRA), Seite 683--689
IEEE
2023
Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time
2023 IEEE International Conference on Robotics and Automation (ICRA), Seite 683--689
IEEE
2023
Baum,
Manuel;
Froessl,
Amelie;
Battaje,
Aravind;
Brock,
Oliver
Estimating the Motion of Drawers From Sound
2023 International Conference on Robotics and Automation (ICRA)
IEEE
2023
Estimating the Motion of Drawers From Sound
2023 International Conference on Robotics and Automation (ICRA)
IEEE
2023
2022
Baum,
Manuel;
Brock,
Oliver
"The World Is Its Own Best Model": Robust Real-World Manipulation Through Online Behavior Selection
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)
2022
"The World Is Its Own Best Model": Robust Real-World Manipulation Through Online Behavior Selection
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)
2022
Baum,
Manuel;
Schattenhofer,
Lukas;
R"ossler,
Theresa;
Osuna-Mascaró,
Antonio;
Auersperg,
Alice;
Kacelnik,
Alex;
Brock,
Oliver
Yoking-Based Identification of Learning Behavior in Artificial and Biological Agents
Proceedings of the International Conference on the Simulation of Adaptive Behavior 2022 -From Animals to Animats 16, Seite 67–78
Herausgeber: Springer International Publishing, Cham
2022
Yoking-Based Identification of Learning Behavior in Artificial and Biological Agents
Proceedings of the International Conference on the Simulation of Adaptive Behavior 2022 -From Animals to Animats 16, Seite 67–78
Herausgeber: Springer International Publishing, Cham
2022
- ISBN
- 978-3-031-16770-6
2021
Baum,
Manuel;
Brock,
Oliver
Achieving Robustness in a Drawer Manipulation Task by using High-level Feedback instead of Planning
Proceedings of the DGR Days, Seite 29-29
DGR Days
2021
Achieving Robustness in a Drawer Manipulation Task by using High-level Feedback instead of Planning
Proceedings of the DGR Days, Seite 29-29
DGR Days
2021
2017
Baum,
Manuel;
Brock,
Oliver
Achieving Robustness by Optimizing Failure Behavior
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seite 5806-5811
2017
Achieving Robustness by Optimizing Failure Behavior
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seite 5806-5811
2017
Baum,
Manuel;
Bernstein,
Matthew;
Martín-Martín,
Roberto;
Höfer,
Sebastian;
Kulick,
Johannes;
Toussaint,
Marc;
Kacelnik,
Alex;
Brock,
Oliver
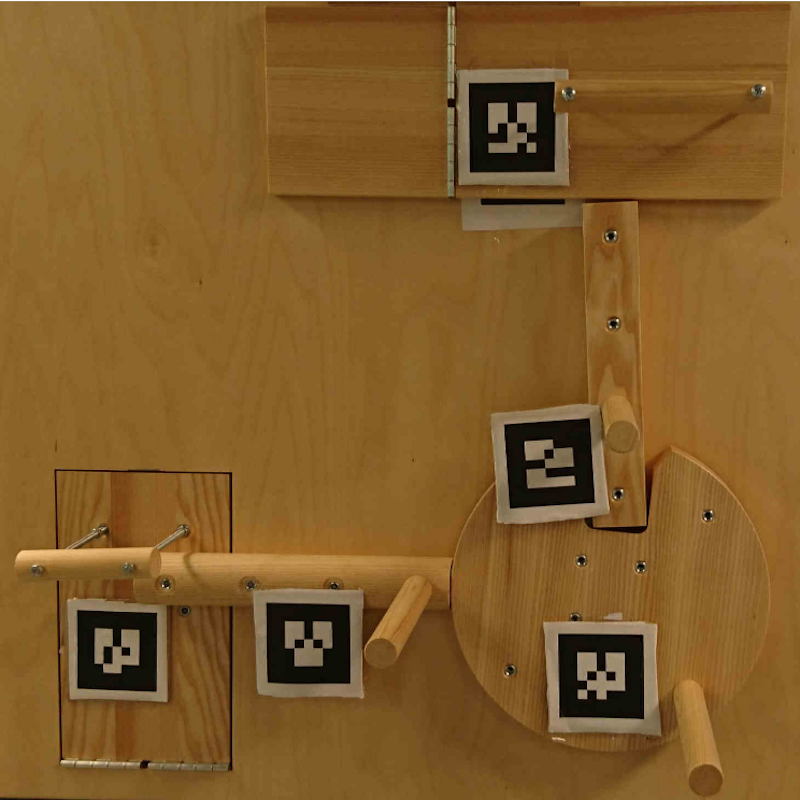
Opening a Lockbox through Physical Exploration
Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids)
2017
Opening a Lockbox through Physical Exploration
Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids)
2017
2015
Baum,
Manuel;
Meier,
Martin;
Schilling,
Malte
Population based Mean of Multiple Computations networks: A building block for kinematic models
2015 International Joint Conference on Neural Networks (IJCNN), Seite 1–8
IEEE
2015
Population based Mean of Multiple Computations networks: A building block for kinematic models
2015 International Joint Conference on Neural Networks (IJCNN), Seite 1–8
IEEE
2015
2014
Baum,
Manuel
Modeling kinematics of a redundant manipulator using population coding and the MMC principle
Bielefeld University
2014
Modeling kinematics of a redundant manipulator using population coding and the MMC principle
Bielefeld University
2014