
 © RBO
© RBO
Apoorv Vaish
Research Interests
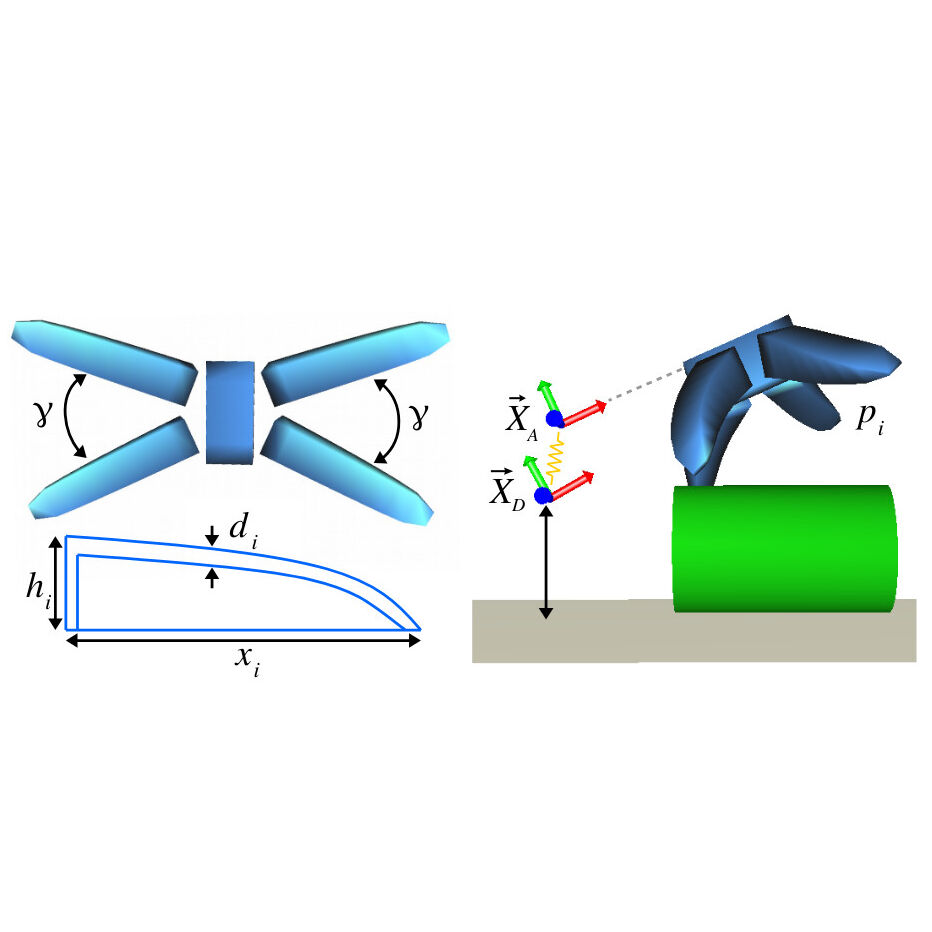
My research aims to understand the synergy between the morphological design and control of soft robots. Given a set of manipulation tasks that the robot must perform, this joint programming of the morphology and control is termed as the co-design of soft robots. I am looking for appropriate inductive biases to guide the search in the ginormous combined search space of hardware and software parameters to achieve competent automated co-design of robots for manipulation
CV
- 2022 - Present
PhD-student at Robotics and Biology Laboratory (Oliver Brock), TU Berlin - 2020 - 2022
CTO, Chloropy - 2019-2020
Entreprenur in Residence, Entrepreneur First & Antler, Singapore - 2018-2019
Master's in Robotics and Advanced Construction, UPC & IaaC Barcelona - 2017-2018
Research Engineer, Bio-inspired Robotics & Design Lab, SUTD-MIT International Design Center, Singapore - 2013-2017
B.E Mechanical Engineering, BITS Pilani India