 © Felix Noak
© Felix Noak
Adrian Sieler
 © Felix Noak
© Felix Noak
| Sekretariat | MAR 5-1 |
|---|---|
| Raum | MAR 5.065 |
| Sprechstunden | Nur nach Vereinbarung |
Forschungsinteressen
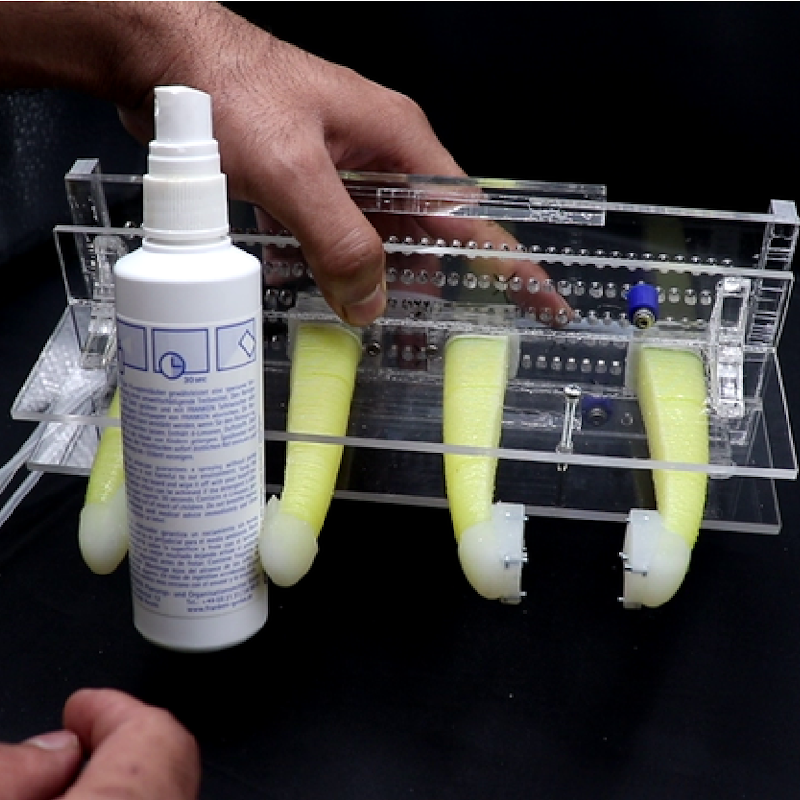
Meine Forschung konzentriert sich auf die Konsequenzen der Verkörperung eines Roboteragenten, um robustes Verhalten bei der Interaktion mit der realen Welt zu erzeugen. Besonders geschickte weiche Roboterhände haben Eigenschaften, die eine neue Perspektive auf eine der großen Herausforderungen in der Robotik ermöglichen - die autonome Manipulation mit der Hand. Daher untersuche ich, wie man die morphologische Berechnung (MC), die die Hand bei der physischen Interaktion mit der Umgebung durchführt, am effizientesten nutzen kann, um neue Kontroll- und Planungsansätze zu entwickeln. Klassische analytische und lernbasierte Ansätze sind nicht direkt anwendbar, da sie mit einem starren Handparadigma für die Manipulation im Hinterkopf entwickelt wurden. Dies motiviert zur Entwicklung einer neuen Reihe von Werkzeugen, um die Rechenleistung des Körpers voll auszuschöpfen.
Kurzlebenslauf
- 06.2019 - heute
- Doktorand, Robotics and Biology Lab, TU Berlin (Oliver Brock)
- Mitglied des Exzellenzklusters Science of Intelligence
- 04.2016 - 03.2019
- MSc Mathematics in Data Science - TU München
- 04.2018 - 12.2018
Masterarbeit, Siemens AG - Corporate Technology: Mechatronic Systems
Thema: Simulation-Based Reinforcement Learning of Complex Reflexes for Low-Level Robotic Systems
- 04.2018 - 12.2018
- MSc Mathematics in Data Science - TU München
- 08.2018 - 05.2019
- Studentischer Beschäftigter, German Aerospace Center (DLR), Oberpfaffenhofen
Teil des Autonomous Learning Robots Lab
- Studentischer Beschäftigter, German Aerospace Center (DLR), Oberpfaffenhofen
- 10.2012-04.2016
- BSc Mathematik - TU Münschen
- 12.2015 - 03.2016
Bachelorarbeit
Thema: Refinement and Coarsening of Online-Offline Data Mining Methods with Sparse Grids
- 12.2015 - 03.2016
- BSc Mathematik - TU Münschen
 © Posifa
© Posifa
 © Sumit Patidar
© Sumit Patidar
 © RBO
© RBO
Publikationen
2023
Sieler,
Adrian;
Brock,
Oliver
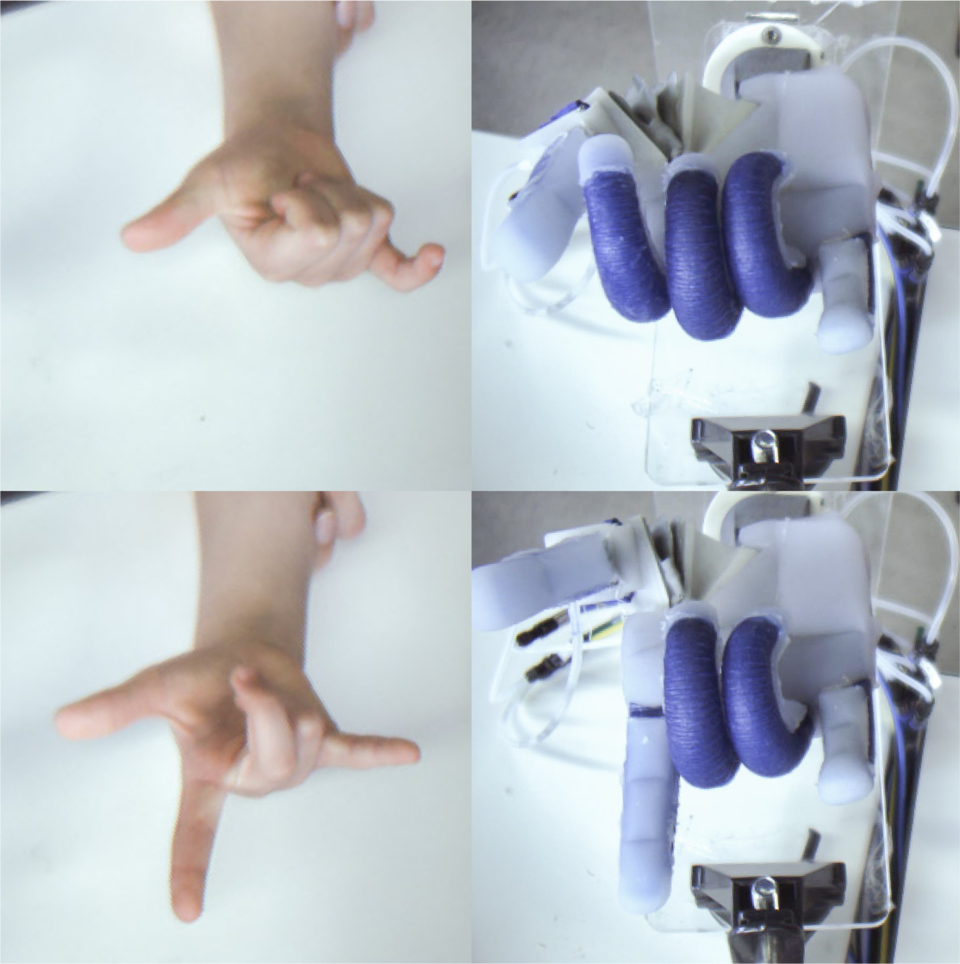
Dexterous Soft Hands Linearize Feedback-Control for In-Hand Manipulation
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)
2023
Dexterous Soft Hands Linearize Feedback-Control for In-Hand Manipulation
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)
2023
Patidar,
Sumit;
Sieler,
Adrian;
Brock,
Oliver
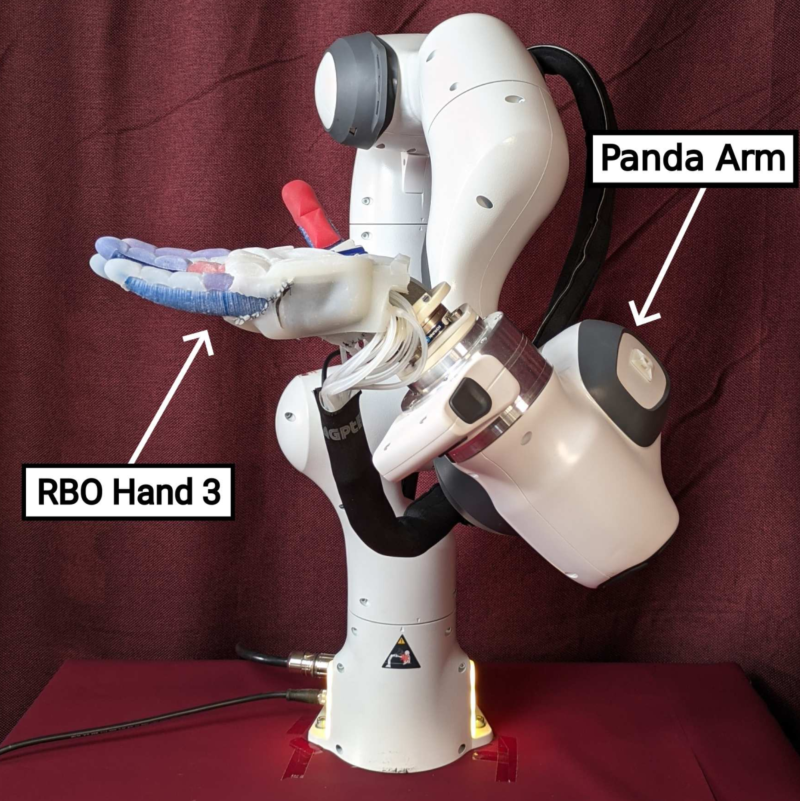
In-Hand Cube Reconfiguration: Simplified
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)
2023
In-Hand Cube Reconfiguration: Simplified
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)
2023
2021
Bhatt,
Aditya;
Sieler,
Adrian;
Puhlmann,
Steffen;
Brock,
Oliver
Surprisingly Robust In-Hand Manipulation: An Empirical Study
Proceedings of Robotics: Science and Systems
Herausgeber: Virtual
Juli 2021
Surprisingly Robust In-Hand Manipulation: An Empirical Study
Proceedings of Robotics: Science and Systems
Herausgeber: Virtual
Juli 2021