Motion Generation
Motion Generation is concerned with the planning and execution of motion tasks while avoiding collisions. We are especially interested in motion generation for mobile manipulators operating in the real world.
Mobile manipulation takes place in unstructured environments which still poses a challenge for motion generation method. Detailed and reliable models of unstructured environments are usually not available. The robot has to perceive the world with its on-board sensors to obtain the information needed for collision-free motion and successful execution of manipulation tasks. To do so efficiently, it needs to 1) exploit rich feedback from different sensor modalities, 2) reason efficiently about the uncertainty present in the environment, and 3) balance exploration with exploitation.
Multi-modal Control for Manipulation
 © RBO
© RBO
We want to find methods for motion generation that leverage the full perceptual capabilities of mobile manipulators. These methods should integrate visual and force perception to perceive the world while moving in it. Current motion planning methods do not incorporate the high-dimensional information of currently available sensors and thus are limited in robustness. To overcome this, we shift the boundary between planning and control. Giving more responsibility to control allows us to leverage the inherent capability of controllers; dealing with dynamic situations.
Visual servo control defines tight perception-action loops on task-relevant visual features. Force control provides complex manipulation skills using force feedback. We want to find these loops and use them for motion generation. We believe that using recursive estimation, a robot can learn multi-modal servo controllers while manipulating the world. These controllers adapt to the available information, the task, and thus provide more general and robust motion skills.
Motion planning
 © Arne Sieverling
© Arne Sieverling
Motion Planning is the task of finding a way to move a robot from one position to another while avoiding obstacles. To do this, we need to find a trajectory in the space of all possible robot configurations. For a robot with several joints, this search space is high dimensional and very complex. Even for simple two-dimensional spaces, general motion planning is NP-hard.
We think that a successful and fast motion planning algorithm has to balance between two general planning strategies: Exploration and exploitation. Exploration tries to obtain information about the connectivity of the space without considering any specific goal. Exploitation tries to find a valid path to a specific goal, using the available information.
In our motion planners, we use several sources of information to balance exploration and exploitation. Utility-guided sampling apply guided exploration by choosing samples with maximal expected utility. This approach gives us a good understanding of connectivity using much less samples than other approaches. Disassembly planning uses the 3D-workspace connectivity to identify the regions of the configuration space where a detailed search is needed. This connectivity can be obtained by expanding the workspace with a tree of bubbles. The same workspace information is used in our Exploring/Exploiting Tree. In easy regions we use the workspace information as a navigation function to drag the robot along the spheres. If this approach fails in hard regions, we gradually shift to exploration.
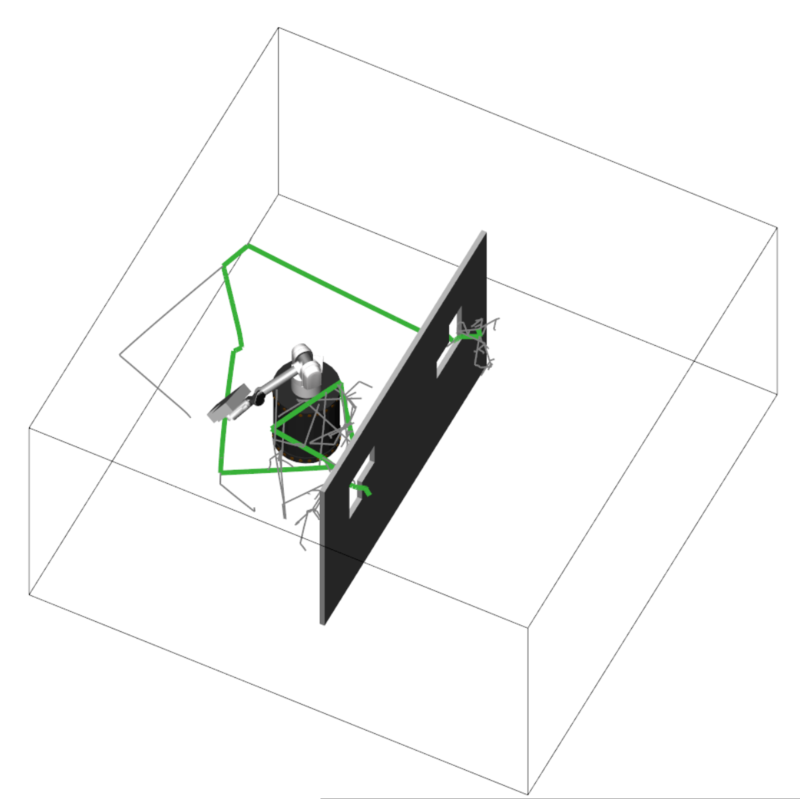
Motion Generation under Uncertainty
 © RBO
© RBO
A mobile manipulator in unstructured environments needs to account for uncertainty due to noisy sensors with limited range and partially unknown, dynamic environments. General algorithms that plan under uncertainty are infeasible to use in real applications due to their high complexity. Feedback controllers provide many desirable qualities for planning under uncertainty. Controllers continuously integrate new sensor data using task-relevant modalities. These local controllers reduce uncertainty about the robots state in the environment implicitly, so much that we do not consider it during planning. A source of uncertainty we cannot ignore is the environment itself. We propose a time-dependent probabilistical model for the uncertain state of the world. In the case of an environment composed of static and moving obstacles, we can solve planning problems in polynomial time by solving an Expected Shortest Path problem. The solution to this problem is a motion policy for the robot that incorporates goal-directed sensing actions and task-consistent motion.
Alexander von Humboldt professorship - awarded by the Alexander von Humboldt foundation and funded through the Ministry of Education and Research, BMBF, July 2009 - June 2014
Soft Manipulation (SoMa) - funded by the European Commission in the Horizon 2020 program, award number 645599, May 2015 - April 2019.
Flexible Skill Acquisitionen and Intuitive Robot Tasking for Mobile Manipulation in the Real World (First MM) - funded by European Commision, in the program Cognitive Systems and Robotics, award number FP7-ICT-248258, February 2010 - July 2013
Publications
2018
Contingent Contact-Based Motion Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Page 6615–6621
October 2018
2017
Elastic network model of learned maintained contacts to predict protein motion
PLOS ONE, 12 (8) :e0183889
August 2017
First Analysis of Environment Design for Motion Planning with Contact
July 2017
Towards Motion Plans That React to Contact Events
RSS workshop: Revisiting Contact - Turning a problem into a solution
July 2017
Exploiting Contact for Efficient Motion Planning Under Uncertainty
RSS workshop: Revisiting Contact - Turning a problem into a solution
2017
Interleaving Motion in Contact and in Free Space for Planning Under Uncertainty
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Page 4011-4017
2017
2015
Incremental, Sensor-Based Motion Generation for Mobile Manipulators in Unknown, Dynamic Environments
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Page 4761-4767
May 2015
2014
Balancing Exploration and Exploitation in Sampling-Based Motion Planning
IEEE Transactions on Robotics, 30 (6) :1305-1317
December 2014
Sensor-Based, Task-Constrained Motion Generation Under Uncertainty
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Page 4348-4355
May 2014
2011
Efficient Motion Planning for Intuitive Task Execution in Modular Manipulation Systems
Technische Universität München, Munich, Germany
2011
2010
Using Tree-Based Robot Motion Planning Algorithms for Protein Loop Closure
Institute of Biology, Humboldt University of Berlin, Germany
December 2010
Elastic Roadmaps - Motion Generation for Autonomous Mobile Manipulation
28 (1) :113-130
2010
ISSN: 0929-5593(Print) 1573-7527 (Online)
2008
Balancing Exploration and Exploitation in Motion Planning
IEEE International Conference on Robotics and Automation, Page 2812-2817
Publisher: Pasadena, USA
May 2008
- DOI
- 10.1.1.115.6699
- ISBN
- 978-1-4244-1647-9
2007
Sampling-Based Motion Planning with Sensing Uncertainty
IEEE International Conference on Robotics and Automation, Page 3313-3318
Publisher: Rome, Italy
April 2007
- ISBN
- 1-4244-0602-1/07
Single-Query Motion Planning with Utility-Guided Random Trees
Proceedings of the International Conference on Advanced Robotics, Page 3307-3312
Publisher: Rome, Italy
April 2007
Single-Query Motion Planning with Utility-Guided Random Trees
In Proceedings of the IEEE International Conference on Robotics and Automation, Page 3307-3312
Publisher: Rome, Italy
April 2007
2006
Sampling-Based Motion Planning Using Uncertain Knowledge
Department of Computer Science, University of Massachusetts Amherst
Technical Report
June 2006
Utility-Guided Random Trees
from Technical Report
Department of Computer Science, University of Massachusetts Amherst
June 2006
2005
Efficient Motion Planning Based on Disassembly
Proceedings of Robotics: Science and Systems, Cambridge, Page 01-08
Publisher: USA
June 2005
Toward Optimal Configuration Space Sampling
Proceedings of Robotics: Science and Systems, Page 105-112
Publisher: Cambridge, USA
June 2005
Single-Query Entropy-Guided Path Planning
Proceedings of the International Conference on Advanced Robotics, Page 2124-2129
Publisher: Barcelona, Spain
April 2005
- ISBN
- 0-7803-8914-X/05
Sampling-Based Motion Planning Using Predictive Models
Proceedings of the International Conference on Advanced Robotics, Page 3120-3125
Publisher: Barcelona, Spain
April 2005
- ISBN
- 0-7803-8914-X/05
Motion Planning based on Utility Theory
Unpublished manuscript
2005
2004
Viewing Motion Planning as Disassembly: A Decomposition-Based Approach for Non-Stationary Robots
Department of Computer Science, University of Massachusetts Amherst
Technical Report
December 2004
Model-Based Motion Planning
from Technical Report
Department of Computer Science, University of Massachusetts Amherst, Department of Computer Science, University of Massachusetts Amherst
2004